Auf dieser Seite sollen die einzelnen Bestandteile des Roboters direcs1 näher beschrieben werden.
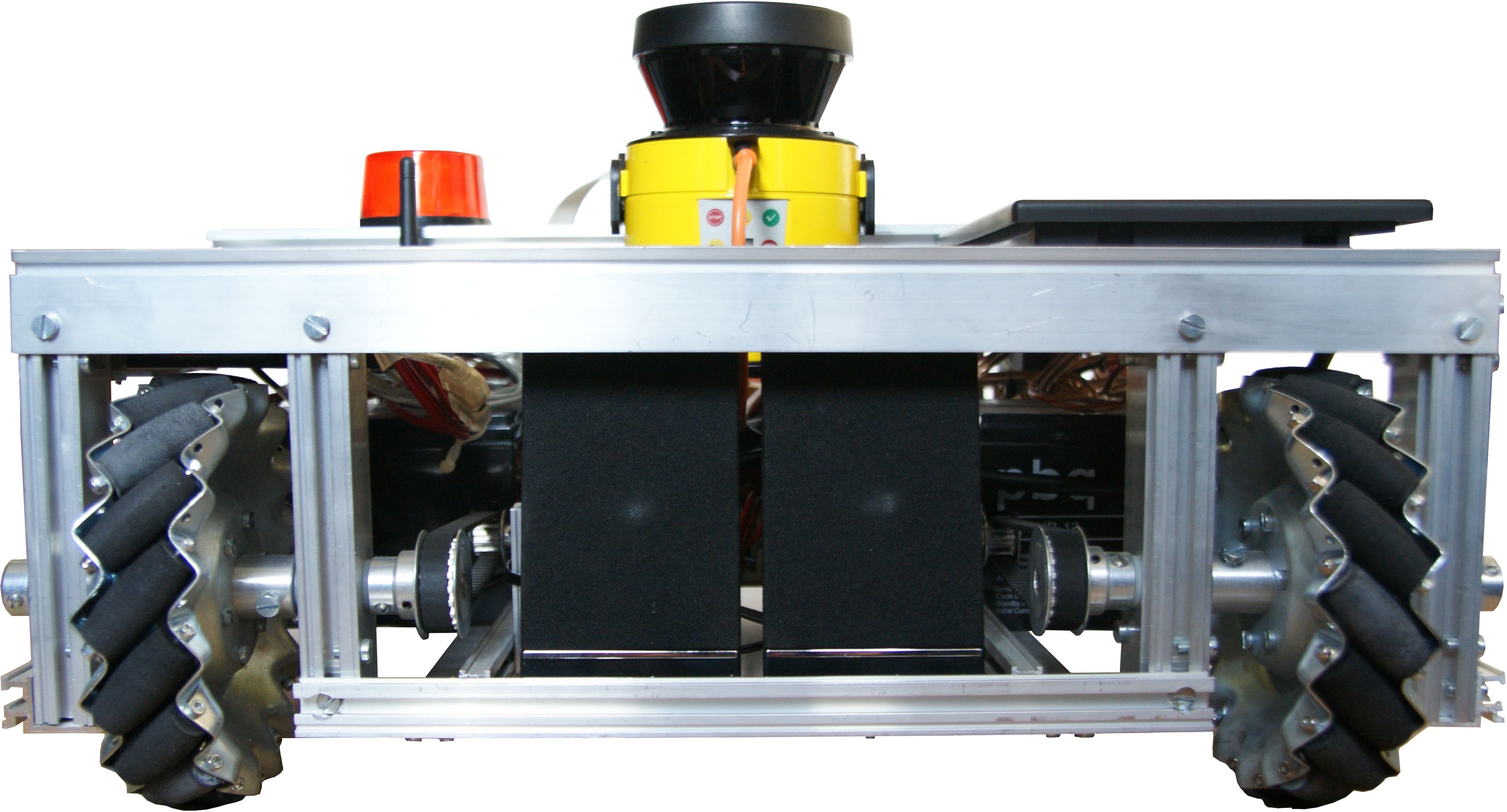
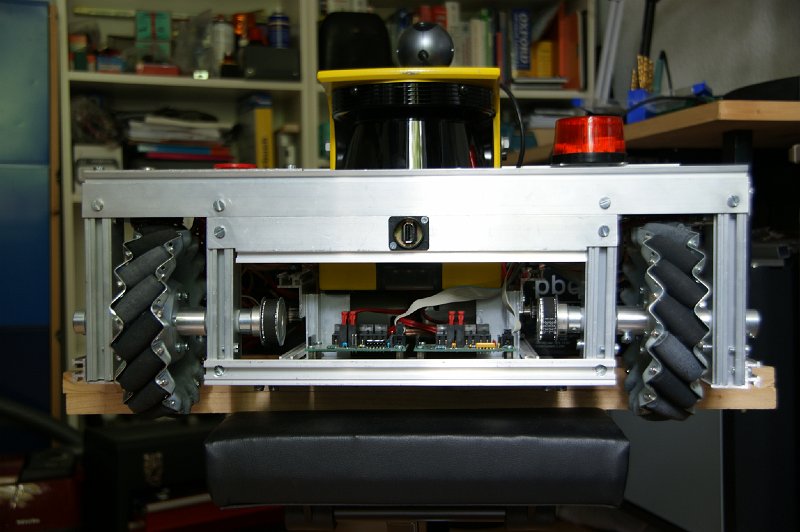
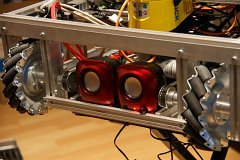
Das Grundgerüst des Roboters sieht wie folgt aus:

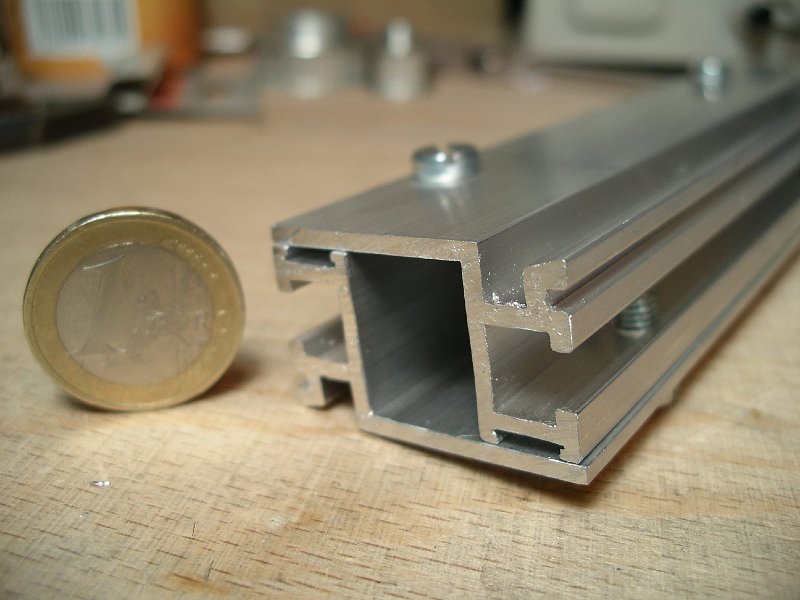
Als Rahmen wurden Aluminium-Profile verwendet, die verhältnismäßig günstig sind:


Bezugsquelle: Kalms Flightcase GmbH
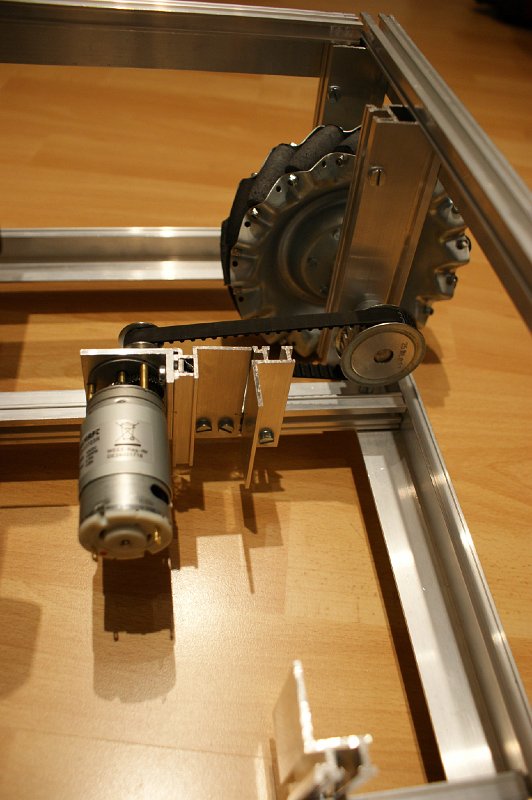
Die Räder sind so genannte Mecanum-Räder. Diese versetzen den Roboter in die Lage
- sich auf der Stelle um sich selbst zu drehen
- links und rechts seitwärts zu fahren
- ganz normal vorwärts und rückwärts zu fahren oder
- diagonal, also schräg nach vorne oder hinten links oder rechts zu fahren:


Die im rechten Bild zu sehenden Aluminium-Halter sind Eigenentwicklungen.
Bezugsquelle: About AndyMark, Inc.
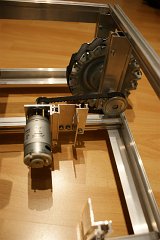
Die Motoren sind vom teuren Conrad. 1-12V Getriebemotoren Modelcraft . Der Roboter besitzt vier 1-12V Getriebemotoren Modelcraft (RB350050-22723R) mit 6200 UPM und 1:50 Untersetzung was dann 110 UPM ergibt. Der Stromverbrauch beträgt je Motor maximal 0,75A wobei sie maximal 0,695 Nm leisten [und nicht 5 Nm wie im Datenblatt fälschlicherweise angegeben]:

Im Bild bereits zu sehen, dass der Motor um einen stabileren Halter aus den obigen Aluminiumprofilen erweitert wurde.
Bezugsquelle: Conrad Electronic SE
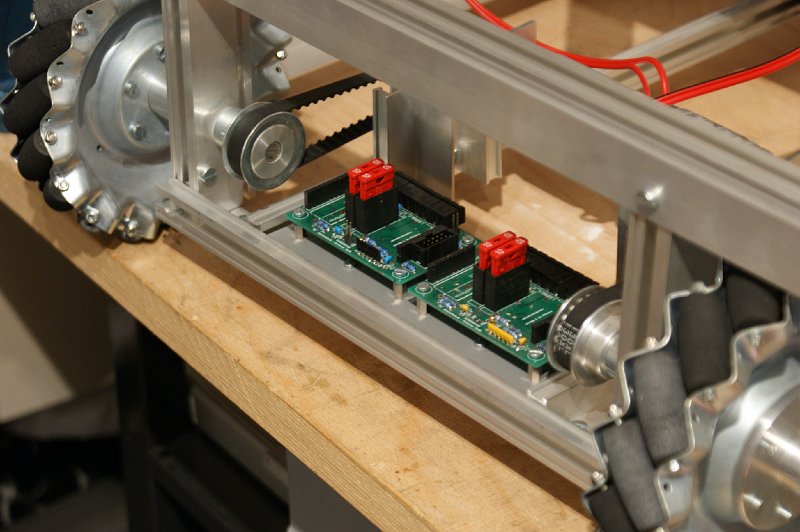
Der Antrieb wurde mittels Zahnriemen und Zahnriemenscheiben realisiert:
Bezugsquelle: Conrad Electronic SE
Die Stromversorgung des Roboters erfolgt über vier 12V-Akkus mit jeweils 7Ah zwei LiPo-Akkus: Einen 4S und einem 6S mit jeweils 5000 mAh und C30:


Bezugsquelle: Pollin Electronic GmbH Ebay
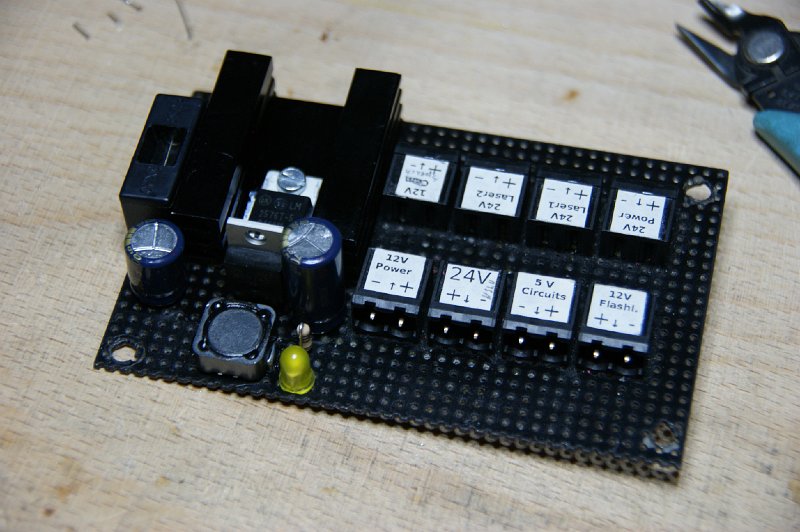
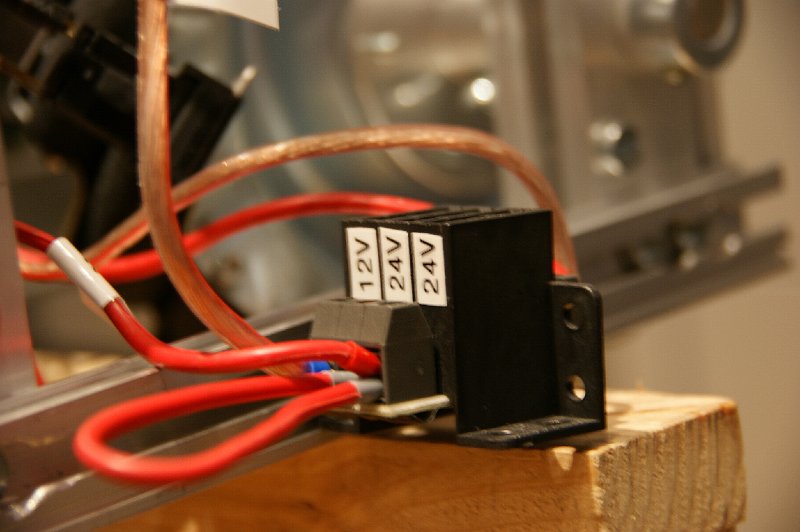
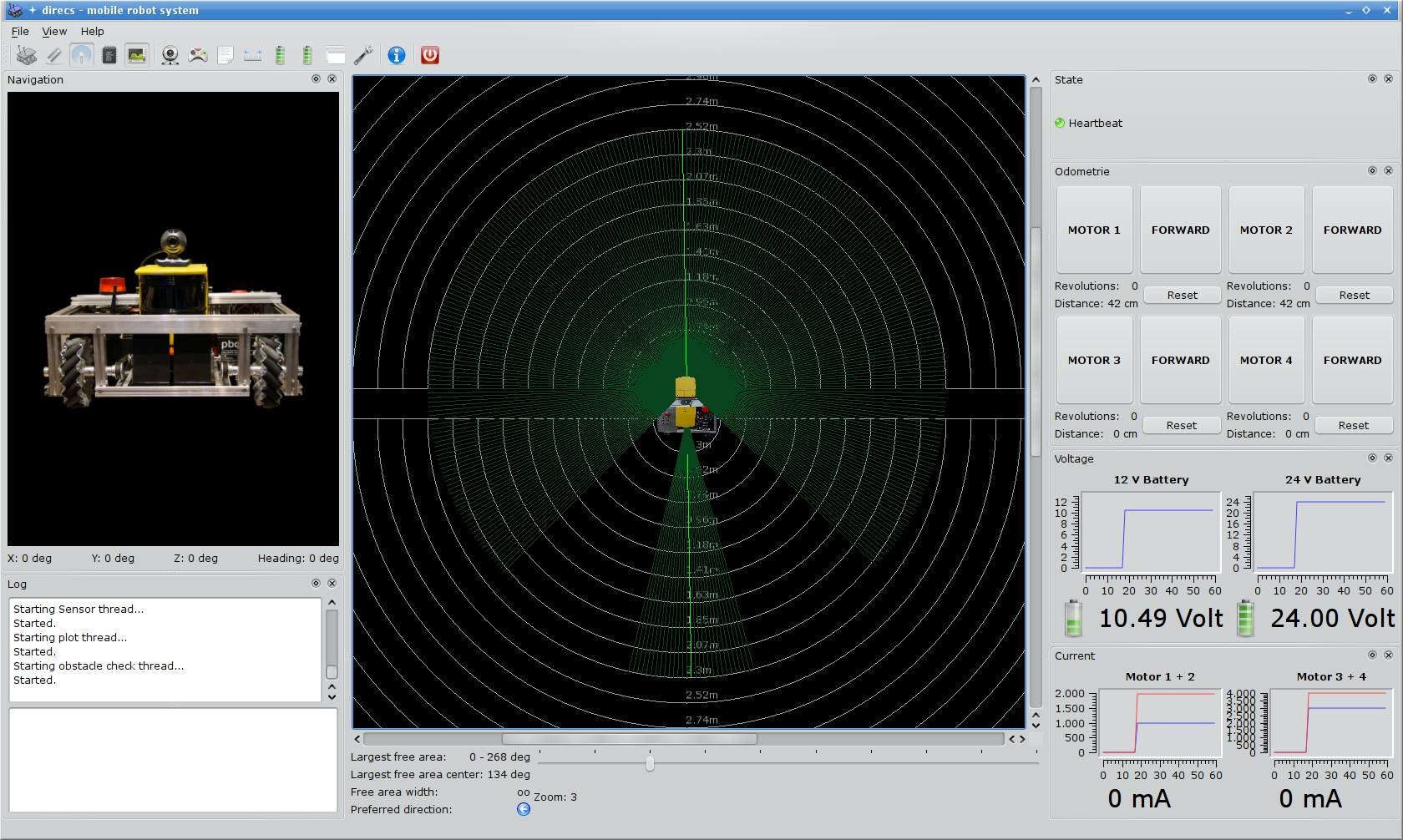
Auf dem Roboter direcs1 stehen drei verschieden Spannungen in zwei verschiedenen Stromkreisen zur Verfügung
- 24V für den Laserscanner in Stromversorgungskreis 1
- 12V für das Commel Mainboard in Stromversorgungskreis 1
- 5V für den Microcontroller und sonstige Sensoren / Schaltkreise in Stromversorgungskreis 1
- 12V für die Motoren in einem eigenen Stromversorgungskreis 2.
Erzeugt werden diese Spannungen mittels Schaltregler auf den folgenden Platinen:


Bezugsquelle: reichelt elektronik GmbH & Co. KG
Die Schaltkreise sind über Sicherungen geschützt:

Bezugsquelle: reichelt elektronik GmbH & Co. KG
Über ein zentrales Panel können die Spannungen (und damit der Roboter) eingeschaltet werden. Der silberne Taster ganz links dient zum Einschalten des fit-PCs. Der Not-Aus-Schalter unterbricht lediglich die Stromzufuhr zu den Motoren:

Bezugsquelle Lochblech: Praktiker Deutschland GmbH
Bezugsquelle Bauteile: reichelt elektronik GmbH & Co. KG
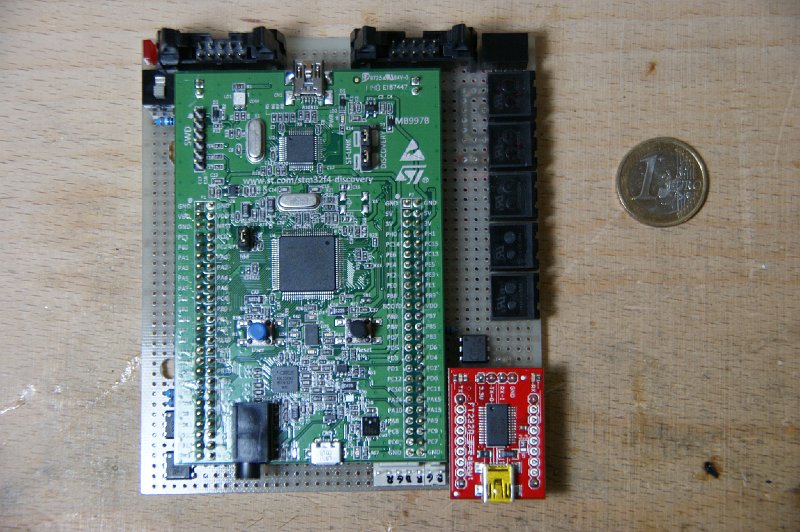
Die Low-Level-Steuerung, also die Ansteuerung der Motorcontroller erfolgt über ein Atmel-Board mit einem AVR2560 STM32F4-Discovery-Board mit ARM-Prozessor:

Auf dem Bild ebenfalls erkennbar diverse Steckverbinder zu weiteren Platinen, Eingänge zum A/D-Wandler, welcher die Akkuspannungen überwacht, ein Optokoppler zum Ansteuern der Warnleuchte (siehe auch Folgefotos), diverse Spannungsversorgungsstecker und ein USB-Seriell-Wandler.
Bezugsquelle: watterott.com
Die Motorsteuerung bzw. Regelung der Geschwindigkeiten erfolgt über die folgenden Boards:

Bezugsquelle: robotikhardware.de
Ein weiterer verwendeter Sensor ist ein 3D-Kompass befindet sich mit auf dem STM32F4-Board, ist aber derzeit noch nicht im Einsatz.
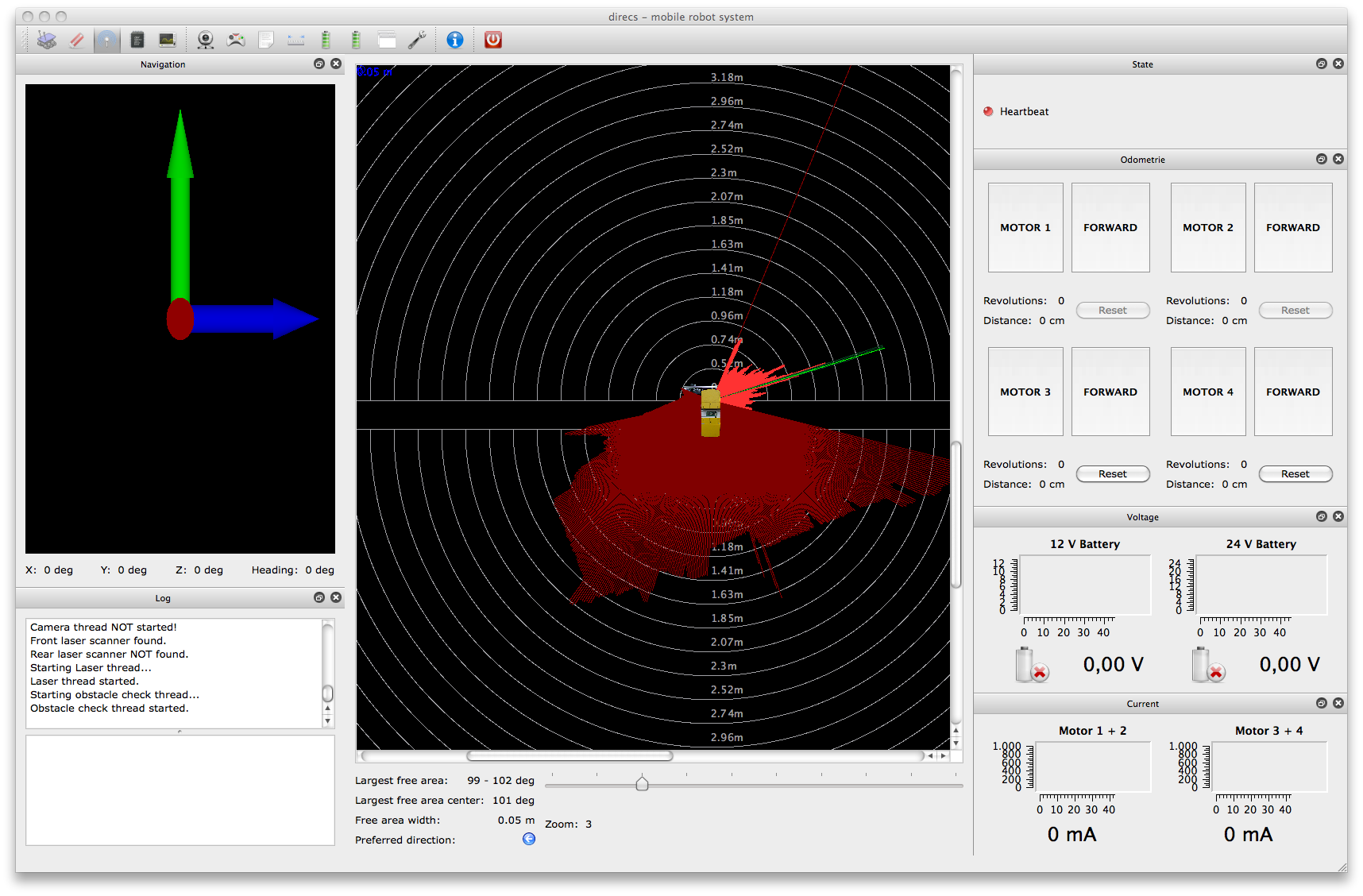
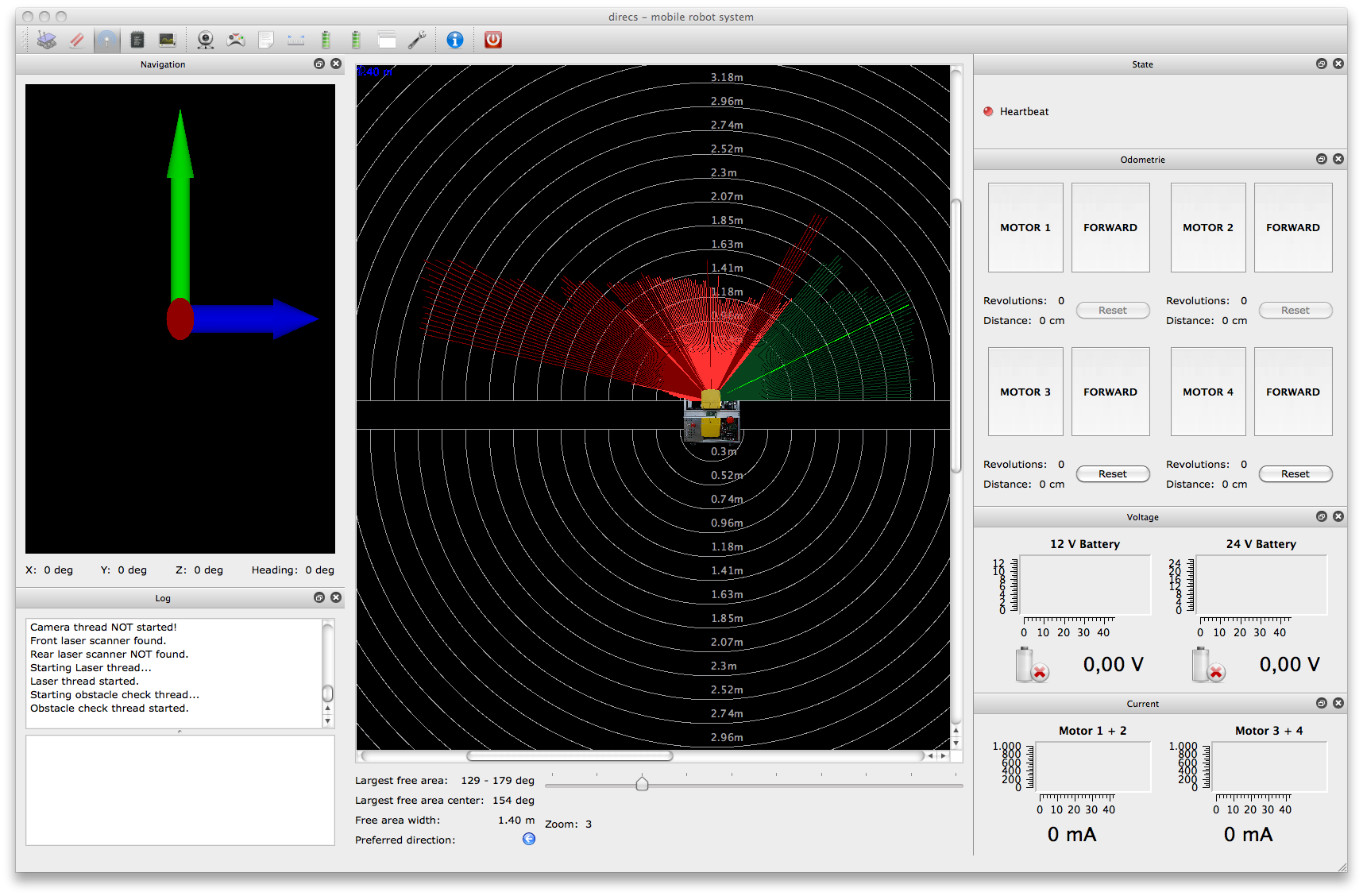
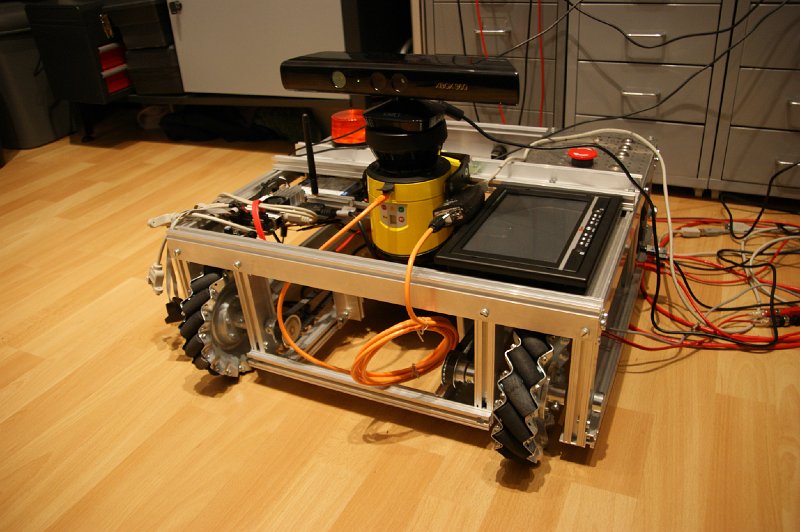
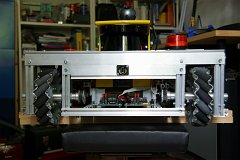
Der größte „Sensor“ ist sicher der SICK Laserscanner (rechts im Bild):
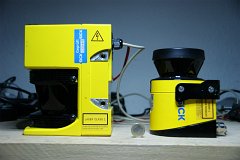
Links im Bild ist noch der zuvor verwendete Laserscanner älterer Bauart (PLS 101-312) zu sehen, der aktuell durch ein moderneren namens S30B-2011BA (S300 Standard) ersetzt wurde. Dieser weist zudem eine Auflösung von 0,5° (gegenüber 1°) und ein Überwachungsfeld von 270° (gegenüber 180°) auf.
Bezugsquelle: eBay
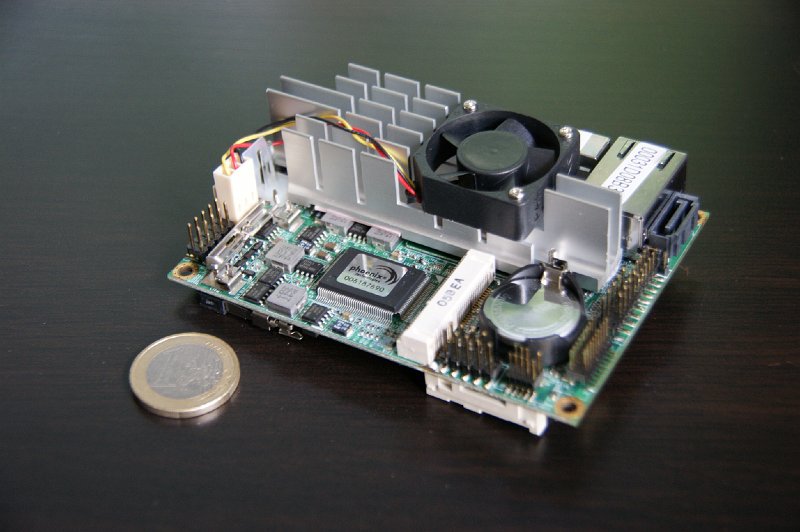
Das eigentliche „Herz“ des Roboters ist ein fit-PC2 vollwertiges pico ITX Mainboard LP-170G von Commell mit Atom-Prozessor, 2 GB RAM, 2,5″ Festplatte, 4 USB-Ports, 2 seriellen Ports, 2 PS/2-Ports, Gigabit-LAN, WLAN, CF-Kartenleser, Audio-Ein und Ausgang und VGA-Ausgang:


Bezugsquelle: HRT Informationstechnik
Zur Anzeige diverser Stati und späteren Steuerung dient ein 7″ Touchscreen von Faytech dessen Eingangssignal über einen Wandler von HDMI nach VGA gewandelt wird:


Bezugsquelle: reichelt elektronik GmbH & Co. KG
Damit der Roboter auch etwas „sieht“, hat er eine Logitech Webcam seit neuestem eine Microsoft Kinect Kamera, deren Bild per WLAN zu eine separaten Applikation oder auf eine beliebige Webseite per motion überträgt:


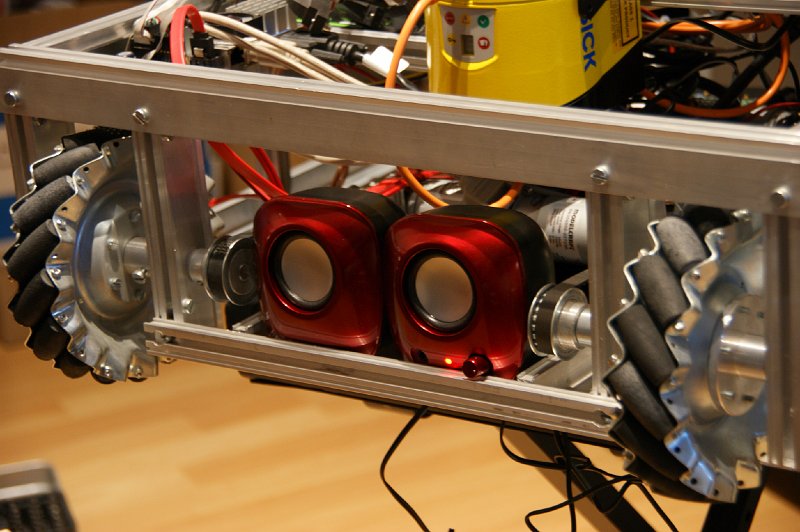
Da direcs1 auch über eine Sprachausgabe verfügt, sind zwei Lautsprecher mit integriertem Verstärker ebenfalls vorhanden:

Um den Roboter über einen externen Joystick oder Gamepad manuell zu steuern, wurde eine externe USB-Buchse von Neutrik montiert (hier noch ein altes Foto mit dem alten Laserscanner rechts):

Bezugsquelle: reichelt elektronik GmbH & Co. KG
Als letztes hat er natürlich auch eine Warnleuchte, wie es sich für einen richtigen Roboter gehört:

Und so sieht er nun (01.09.2012) vollständig aus: