Nach langer langer Analyse des Quellcodes hat sich der Fehler, der dazu führte, dass der Roboter chaotisch in alle Richtungen fuhr, weil die IR-Sensoren immer auslösten, als Hardwareproblem herausgestellt!
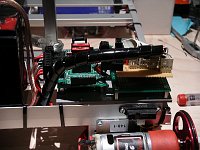
Die neuen Getriebemotoren verursachten zusammen mit der neuen Ansteuerplatine so starke Störungen, dass alle IR-Sensoren bzw. die Platine wo alles zusammenläuft, "Fehlarlarme" also Hindernisse vor den Sensoren signalisierte. Aber das Roboter-Netz-Wiki schaffte einfache Abhilfe. Auf diesen zwei Fotos gut erkennbar, die 3 Kondensatoren und die Ferritkerne zum Entstören der Motoren:


Perfekt! Alle Störungen verschwunden! Und der Lötkolben gerade mal heiß war kam nuch eine Blinkdiode hinzu, die den Betrieb des Roboters signalisiert (aktiv):

Damit die Sensoren-Kabel und die bei der Kamera nicht mehr so sehr im Weg sind, kam noch etwas Spiralschlauch zum Einsatz – sehr praktisch:

Zum einfacheren Testen, der Abstandssensoren wurde dann noch das Arbeitszimmer kurzerhand in eine Teststrecke umfunktioniert:

Nun kann endlich an der Software wieder "geschraubt" werden!