Wie schon geschriebe, waren weitere Infrarot-Sensoren bestellt, welche die Bereiche schräg hinten links und rechts überwachen sollten.
Die Abfolge der Montage der Sensoren ist auf den folgenden Bildern gut zu erkennen;



Ein bißchen Verkabelung ist natürlich auch notwendig:

Hier mal ein paar schöne Fotos, wie der Bot von oben bestück aussieht. Diese Fotos habe zur späteren Verwendung in der GUI verwendet:



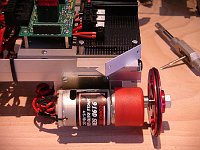
Da die vorige Radkonstruktion leider auch Probleme machte, wurden kurzerhand Gewinde in die Motorachsen geschnitten (nicht gerade leicht):


und Standard-Modellbauräder montiert:


