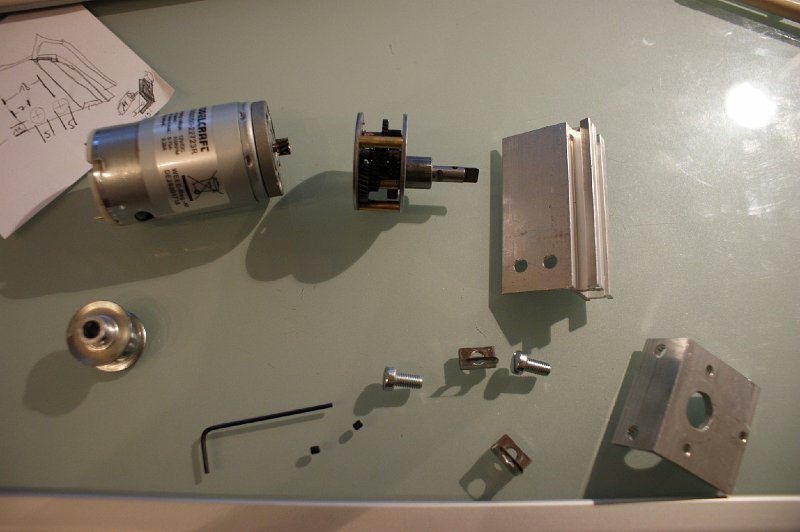
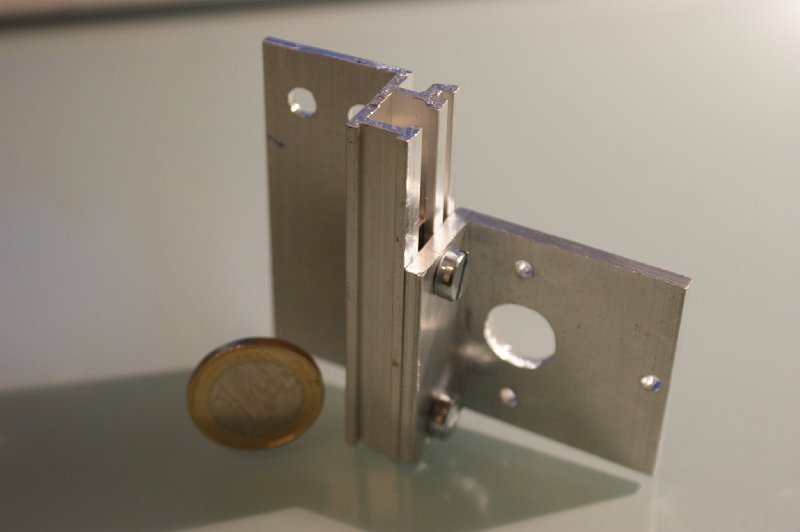
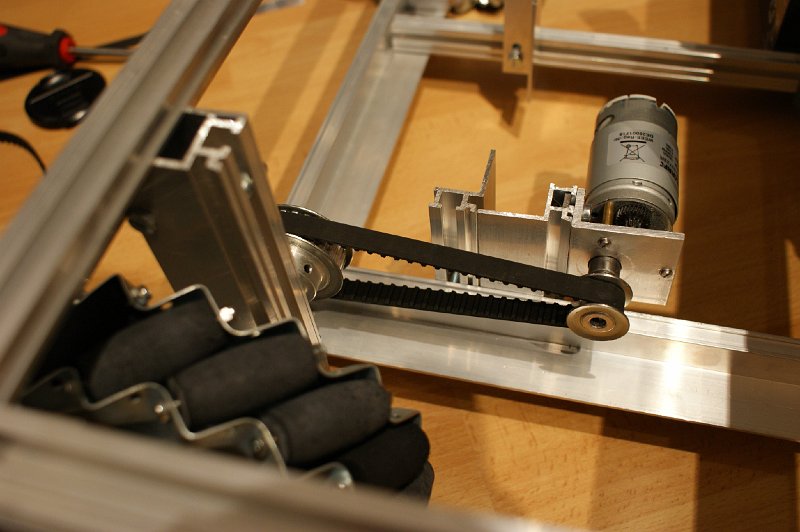
Für den Antrieb des neuen Roboters direcs1 wurden Getriebemotoren von Conrad gewählt, die eine Untersetzung von 200:1 haben. Die Montage erfolgte wie folgt dargestellt. Wie auf dem ersten Bild auf den zweiten Blick zu sehen ist, wurden die Zahnräder mit einem zweiten Gewinde mit Madenschraube versehen um einen noch besseren Halt des Zahnriemen-Zahnrades auf der Welle zu gewährleisten.



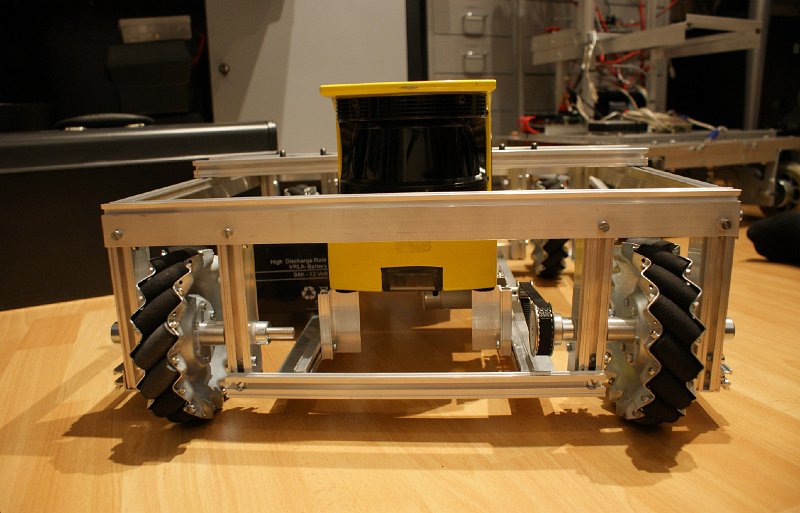
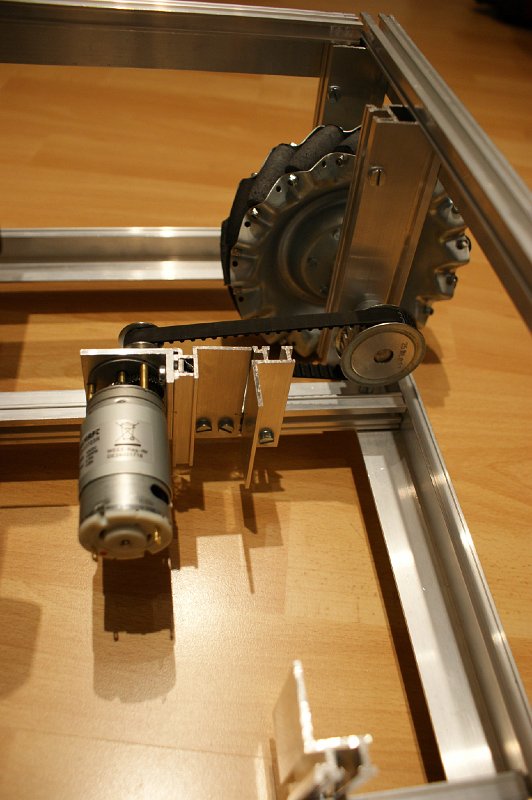
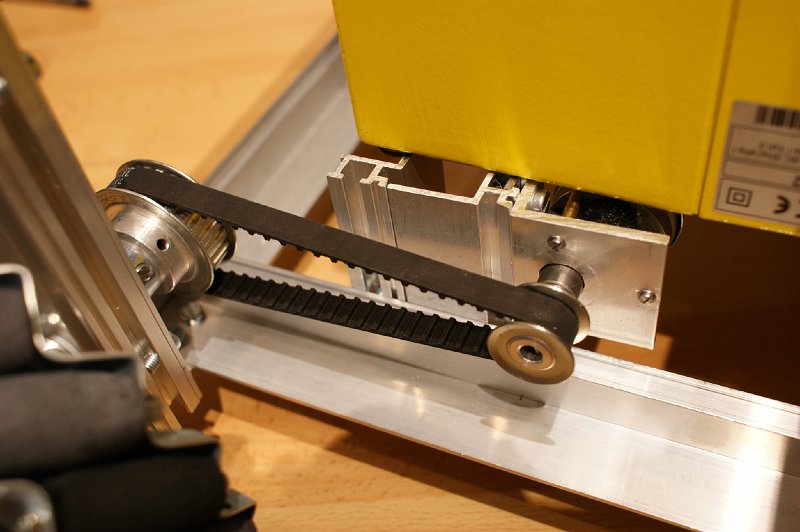
Als nächstes wurde der Motor am Grundrahmen befestigt und mittels Zahnriemen an die Achsen der Räder verbunden. Hier erkennt man übrigens auch, dass die Laserscanner verkehrt herum "auf dem Kopf" montiert wurden. Dieses wurde so gewählt, um dem Roboter eine geringe Bauhöhe zu geben.

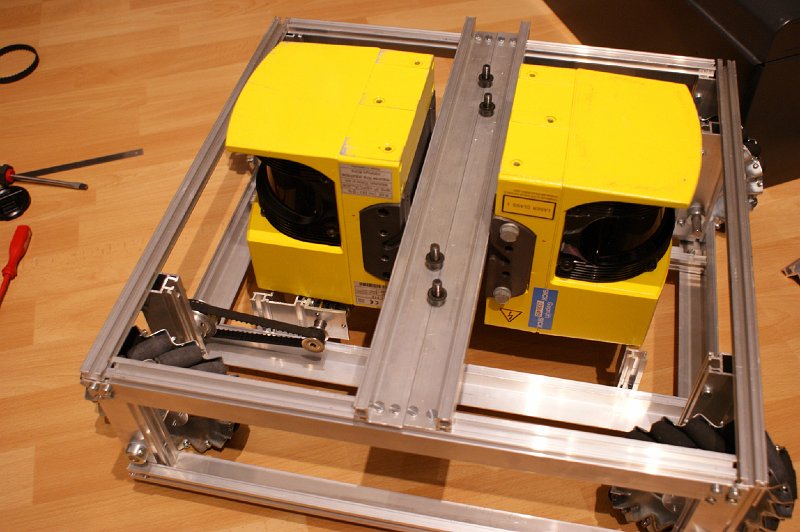

Als letztes wurden zum Testen schon einmal zwei der kommenden vier 12V-Akkus plaziert: