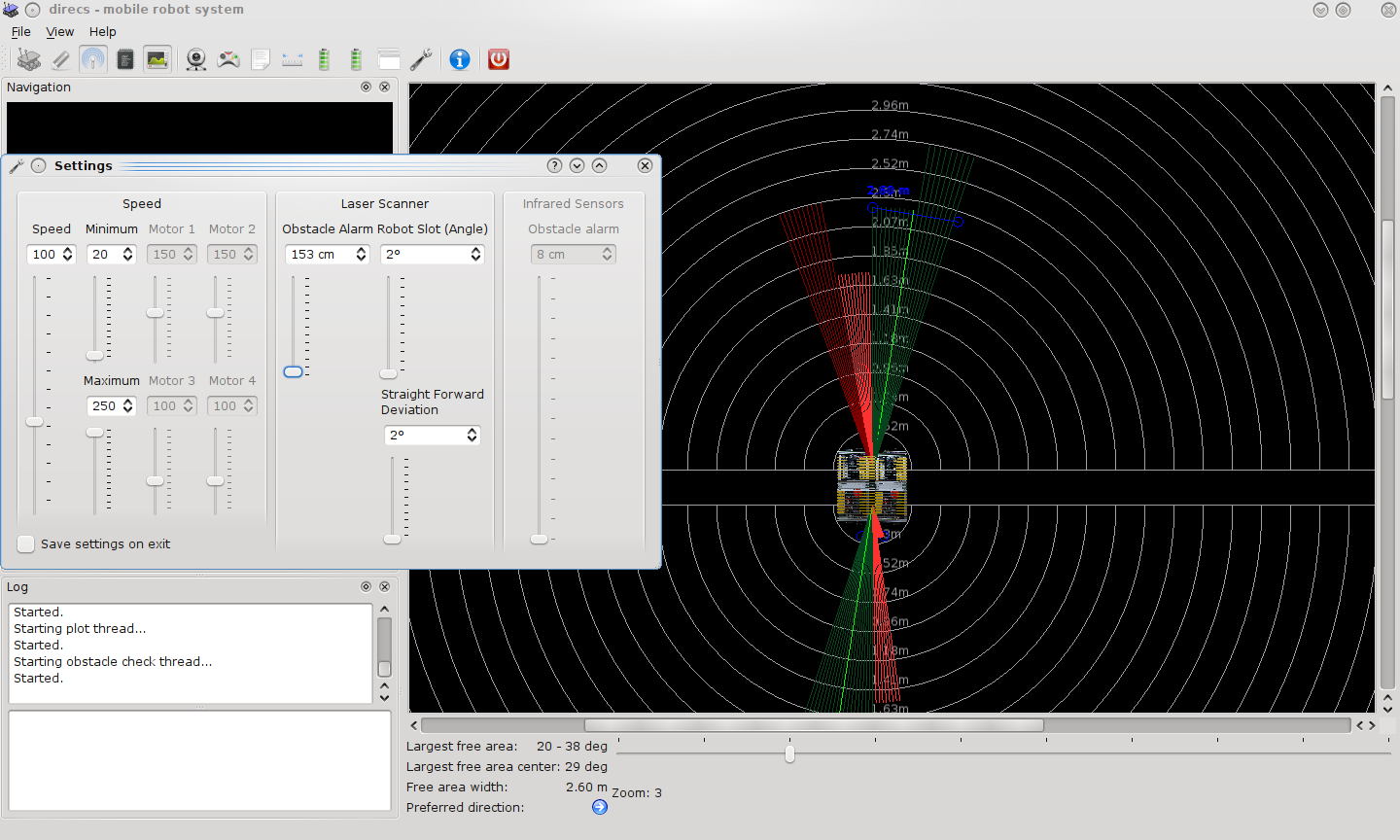
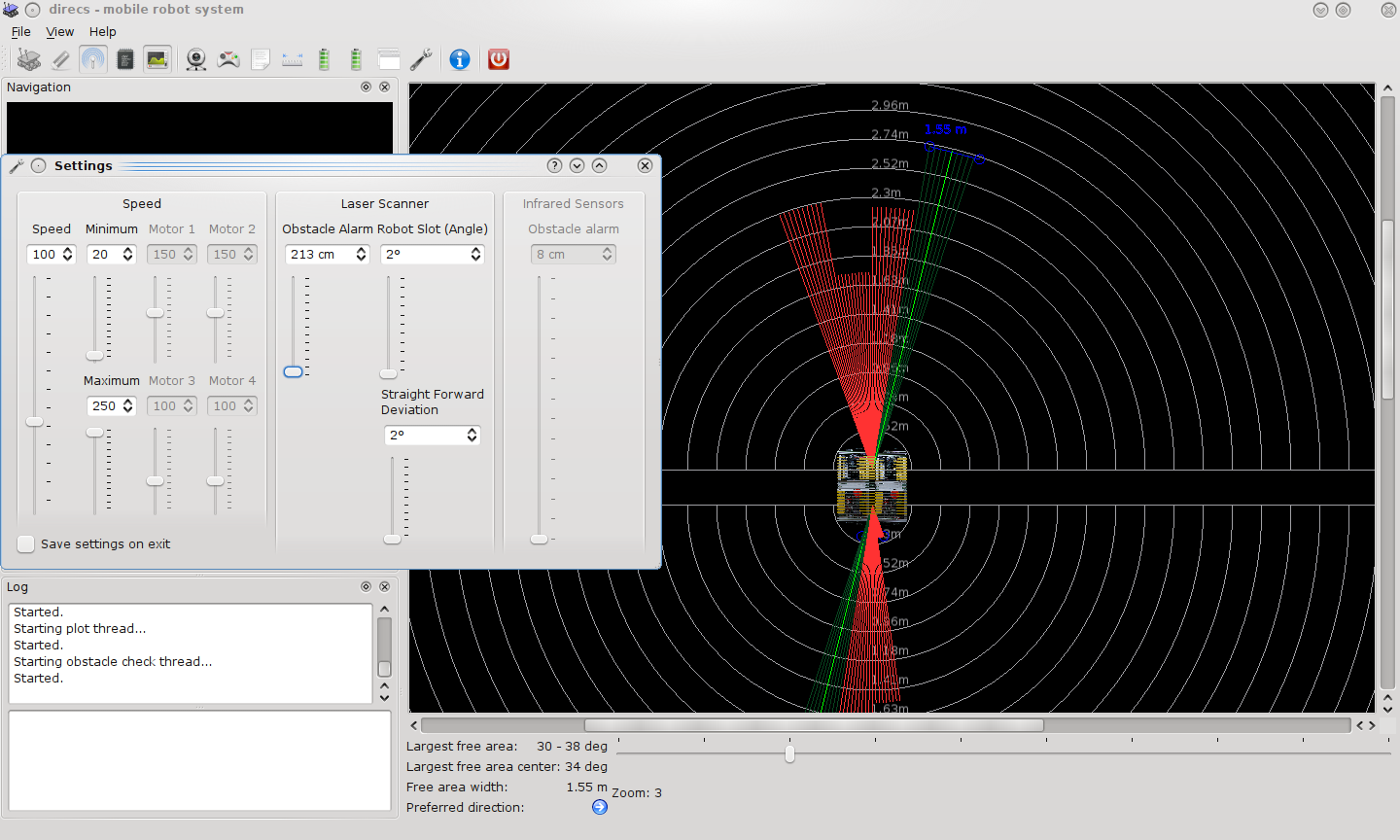
In der Zwischenzeit wurde die GUI um die Anzeige der Durchfahrtsweite des Roboters erweitert. Das heißt, die hier blau angezeigte Linie stellt die gemessene (errechnete) lichte Weite dar. Anhand dieser kann später ermittelt werden, ob der Roboter dort überhaupt durchfahren kann (durch passt) oder nicht. Zusätzlich wird diese Breite als Text – anstatt wie sonst in Labels – direkt in der Laserview, also oberhalb der blauen Linie angezeigt:
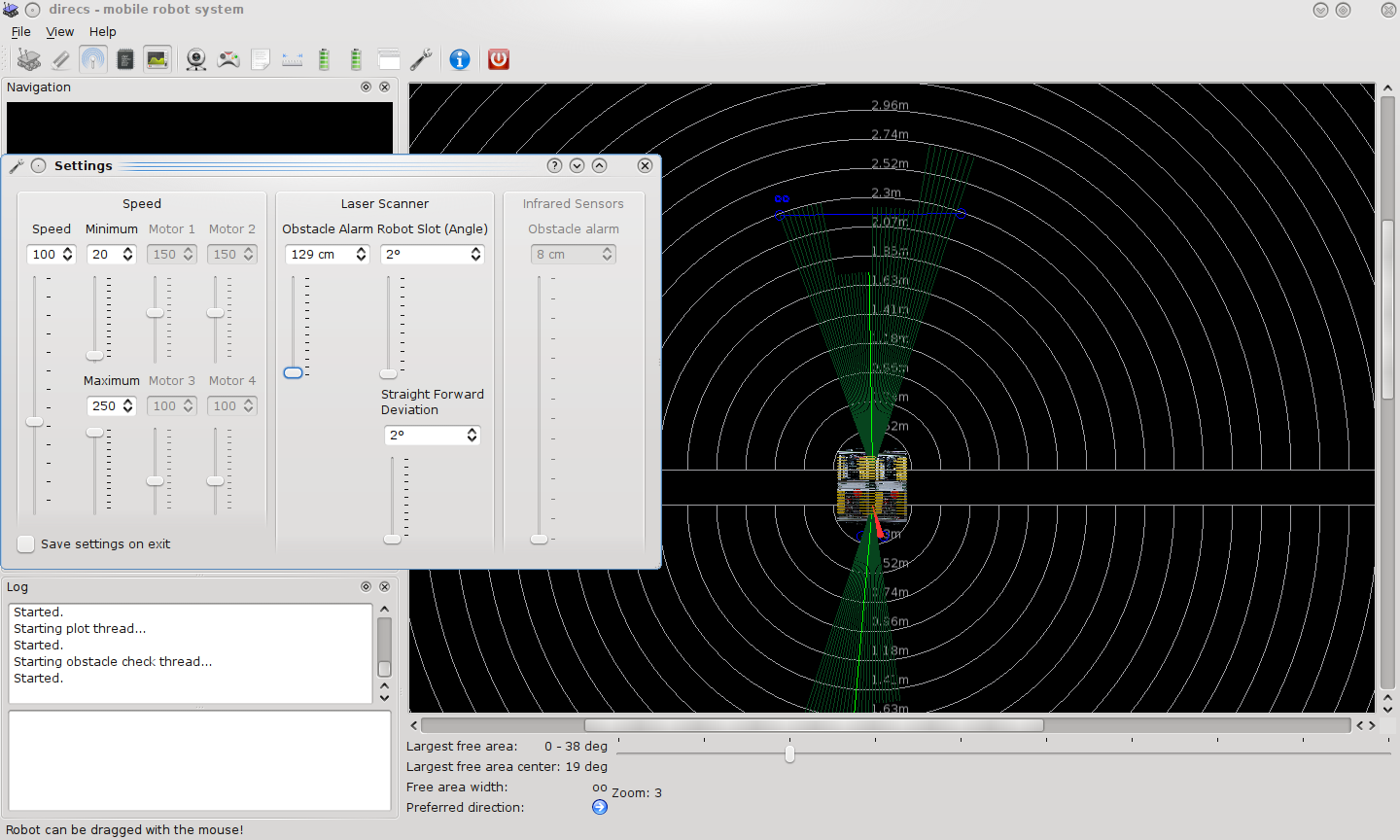
Auf den folgenden Screenshots ist gut zu erkennen, wie sich die anzeige dynamisch anpasst, wenn der Regler Obstacle Alarm verändert wird. Dieser Regler legt fest, bei welcher Entfernung ein Hindernis als solches betrachtet wird.