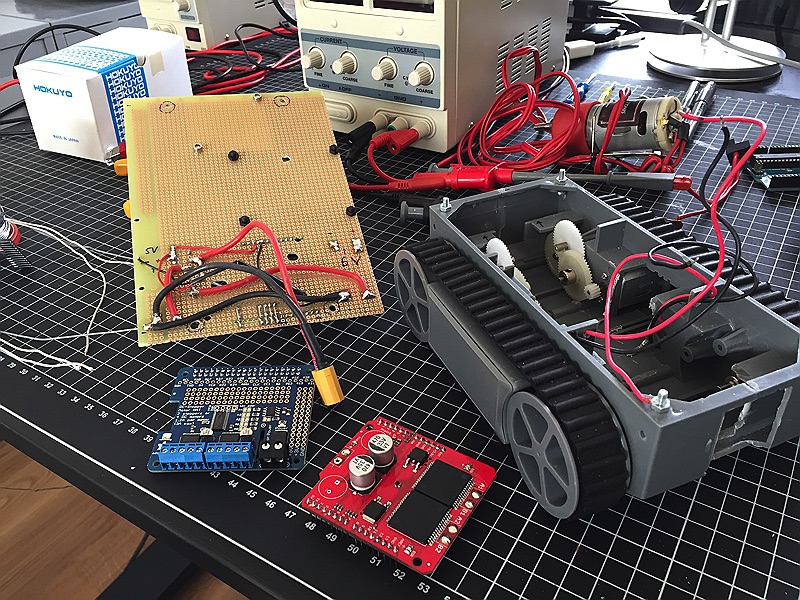
Nachdem ich letztes Mal ewig nach einem Fehler bei der Ansteuerung des Monster Moto Shields suchte, lief es am Ende noch immer nicht mit beiden Motoren – und vor allem nicht in beiden Fahrtrichtungen! Aber woran lag es?
Ich fand noch zwei Fehler in der Verkabelung, da die Bezeichnungen A, B, 1 und 2 mir irgendwie verwirrend erschienen. Wirklich nervig ist aber, dass das Monster Moto Shield einfach nicht beschriftet ist – genauer gesagt, welcher Pin, was bewirkt!
Nach ein paar abschließenden Tests mit einem Arduino und dem Beispielcode stellte sich dann tatsächlich heraus, dass mein Shield defekt war; die Motoren drehten immer nur vorwärts! Auch die „Rückwärts-LED“ leuchte entsprechend nie. Da kann man ja lange Fehler in eigenen Sourcecodes suchen…
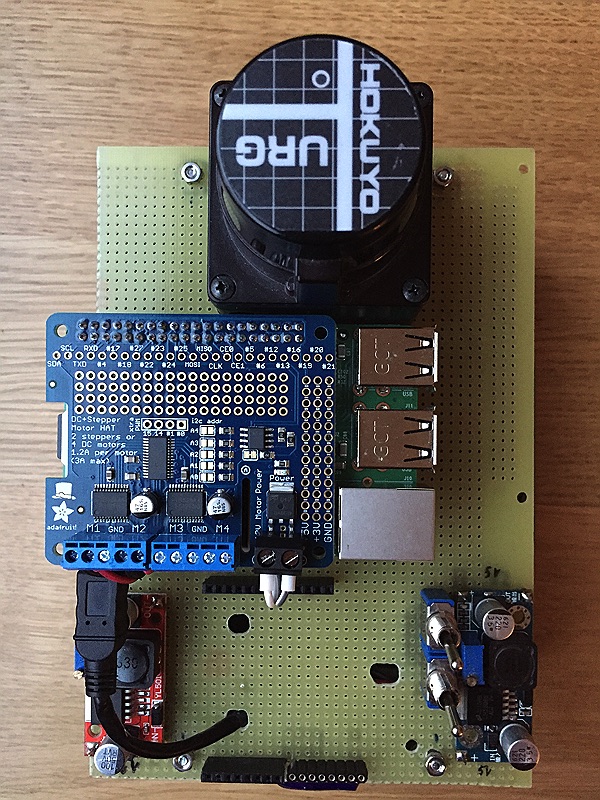
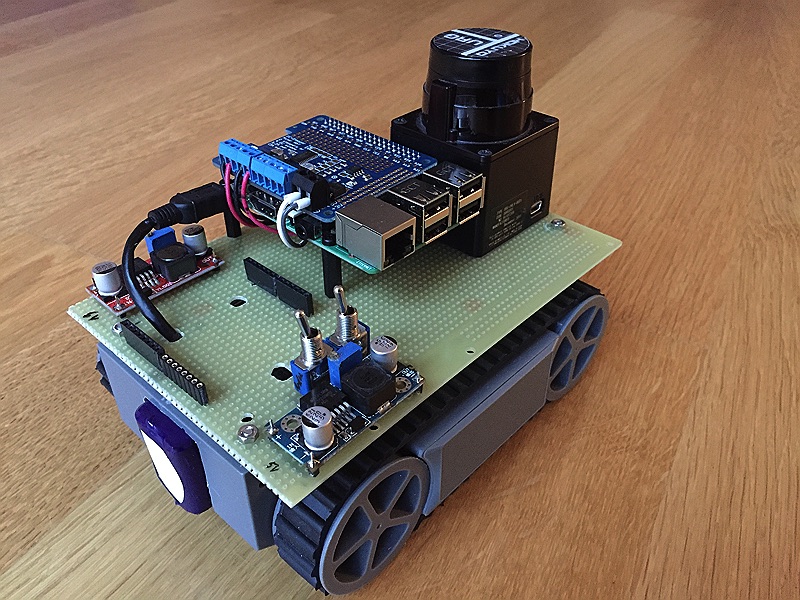
Nun wurde das sowieso viel besser für den Raspberry Pi geeignete Adafruit DC & Stepper Motor HAT for Raspberry Pi – Mini Kit benutzt. Also alles wieder auseinander gerissen und neu verkabelt:
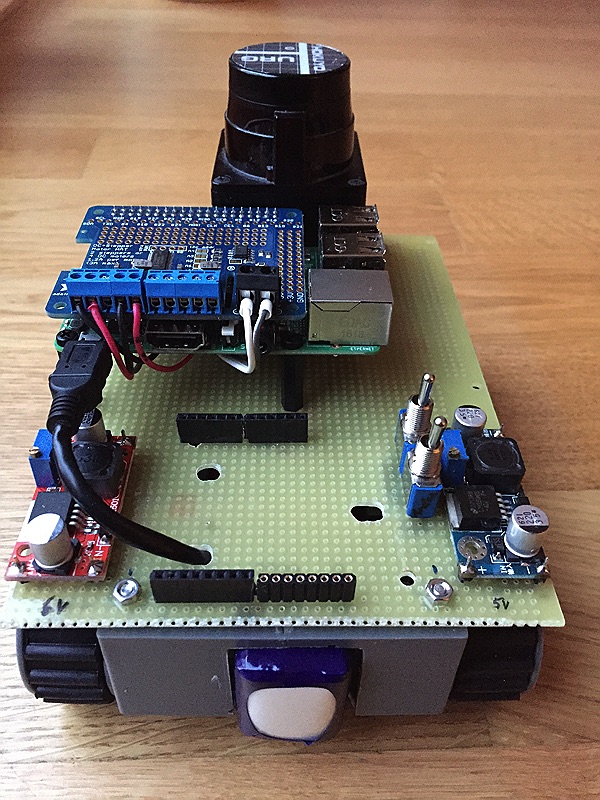
Sieht auch gleich etwas aufgeräumter auf. Die alten Shield-Verbinder verbleiben erst einmal an Ort und Stelle. So sieht er jetzt aus:
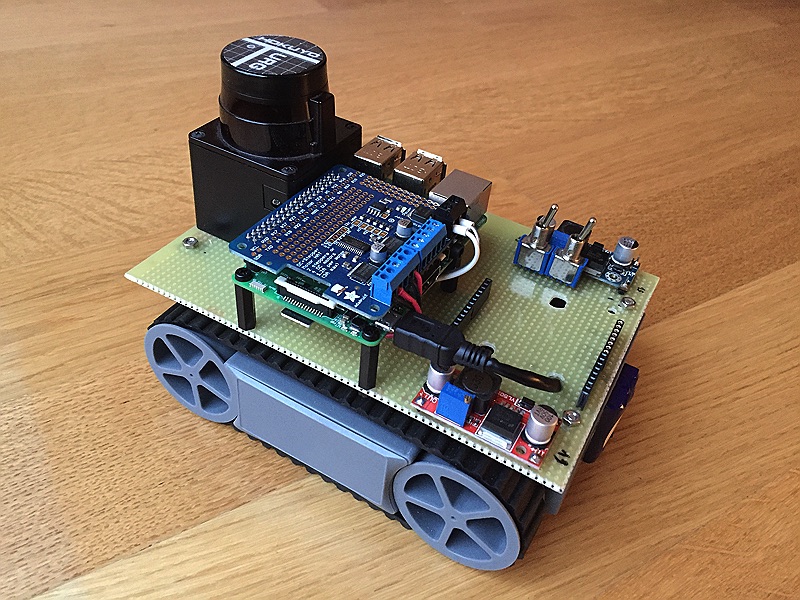
Gestern Abend, dann endlich das erste Erfolgserlebnis. Hier ein etwas dunkles Video wie sich beide Motoren in minimaler und maximaler Geschwindigkeit drehen – ein besseres folgt:
Und hier noch einmal im Tageslicht – mit angepasster Geschwindigkeit:
Als nächstes folgt die Akkuüberwachung – mit Anzeige auf einem kleinen OLED-Display. Yeah.