Wie es sich herausgestellt hat, ist die bis dato verwendete USB-Schaltung zusammen mit dem Laptop, der Programmiersprache C in Verbindung mit dem Ultraschallsensor leider zu langsam. Konkret: Die Timings, die bei zur Abfrage des Ultraschallsensors notwendig sind, müssen genauer sein (im µs Bereich). Was also tun?
Nach langem Prüfen der Möglichkeiten musste nun also doch ein Microcontroller her. Da die AVR Controller von Atmel in der (Hobby)Robtik sich bewährt haben und es hierzu auch viel Unterstützung im Netz gibt, fiel die Wahl auf den Atmega2560 . Sicher etwas überdimensioniert – aber dafür eben auch zukunftssicher. Egal, wie viele Sensoren oder Aktuatoren noch dazu kommen könnten. Also wurde hinten rechts auf dem Roboter eine neue Platine mit dem Microcontroller-Fertigmodul montiert:

Um Versandkosten zu sparen, kam gleich ein (derzeit noch nicht verwendetes) Kompassmodul dazu (rechte Platine):

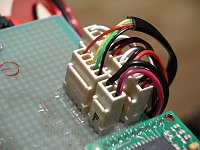
Um Fehler beim Verkabeln zu vermeiden, wurden die Stecker für die Stromversorgung beschriftet
:
Da jeder Bot, der was auf sich hält (oder eben autonom in der Weltgeschichte herum fahren soll) eine Warnleuchte hat, hat das mrs (mobile robot system) nun auch einen:

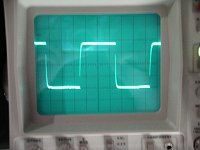
Ein schon lange wartenden Not-Aus-Schalter wurde gleich mit verbaut. Nachdem das Programm für den Microcontroller (MC) fertig war, mussten die Infratot-Sensoren (IR) neu "vermessen" werden bzw. die Umsetzungstabelle "Sensorwert / Abstand in cm" neu gebaut werden:

Nachdem alle Sensoren nun komplett über den Atmega2560 und dessen integrierte A/D-Wandler laufen, wurde die alte USB-Schaltung

ganz überflüssig, da das die Software auf dem Laptop mit dem MC seriell über die USB-Schnittstelle

kommunizieren. Die Software dazu ist mittlerweile auf dem MC und dem Laptop komplett dafür angepasst worden. Die A/D-Wandler, und die alte USB-Schaltung weichten bei der Gelegenheit einer ganz neuen Stromversorgungsplatine:

Die Warnleuchte wird über ein Relais mit 12 V geschaltet. Für allgemeine Testzwecke kamen noch ein paar Messpunkte auch noch dazu.

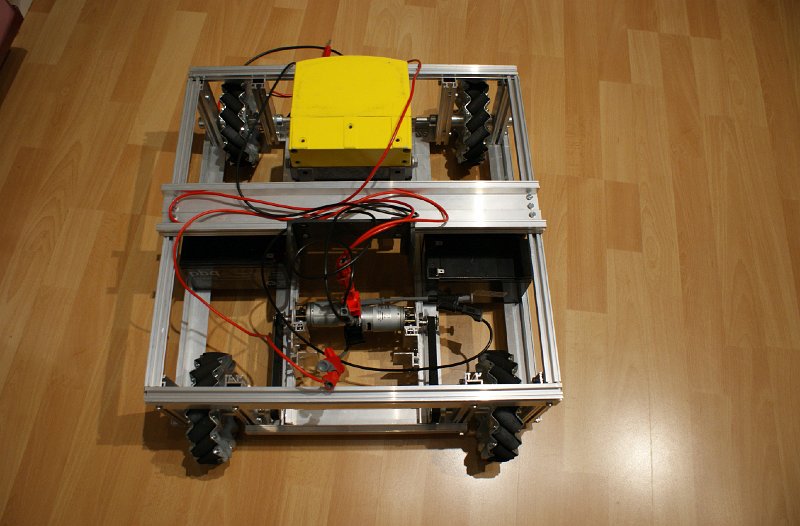
So sieht der Bot dann zu diesem Zeitpunkt aus:

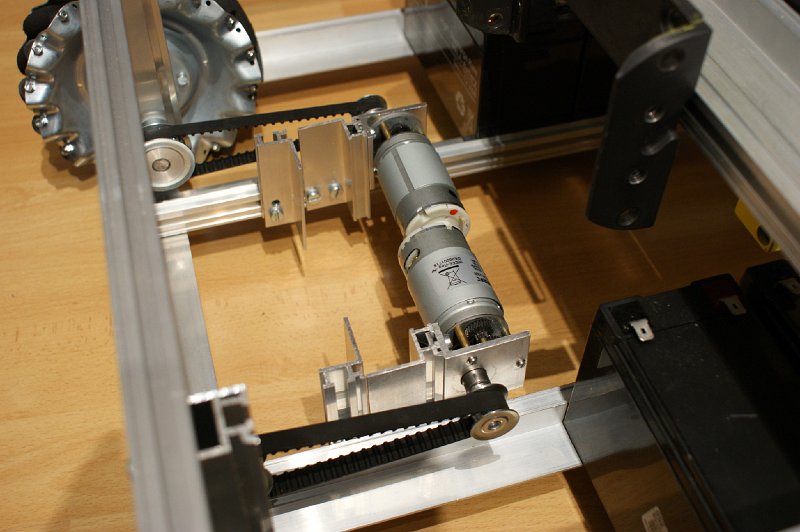
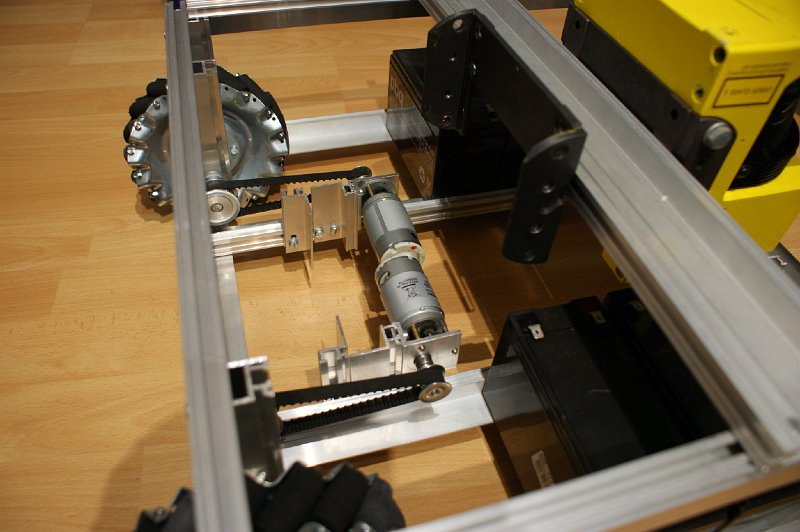
Nachdem die Ansteuerung des Ultraschallsensors (US) über den Microcontroller gestern gelang, kam dieser an seine endgültige Position:

Hier sieht man alle Stecker der Sensoren und des Flashlights auf der MC-Platine;

Und hier den Sensor, unterhalb der CMUCAM:


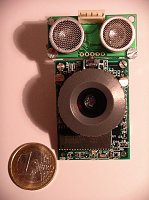
Als letztes kam dann gestern noch eine ehemalige Webcam (Rückseite) hinzu,

die unterhalb des Ultraschallsensors Platz fand. So sieht sie von vorne aus:
Und so montiert:

In der GUI sieht das ganze mit fünf Sensoren dann so aus:

Damit das ganze nicht langweilig wird, ist nun erstmal wieder progammieren angesagt – obwohl – vier weitere Infrarot-Sensoren sind auch schon wieder bestellt. Möge er niemals gegen ein Hindernis fahren…. ;-)