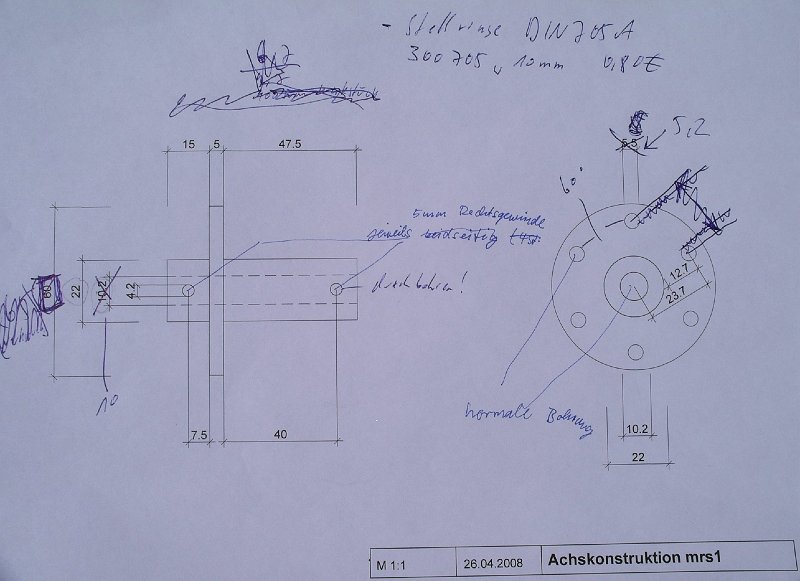
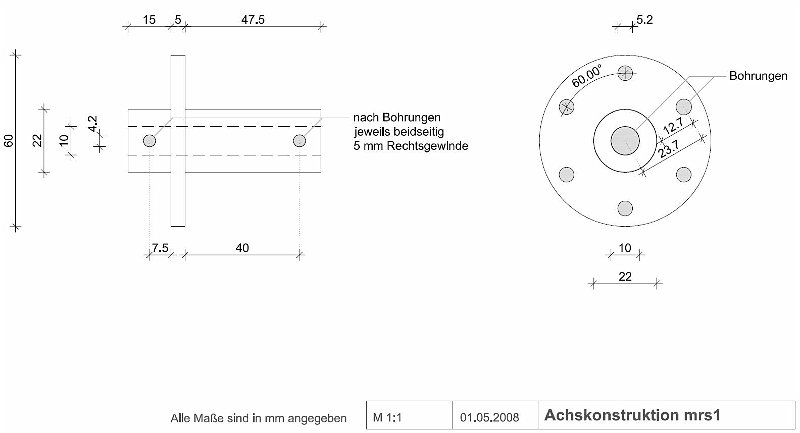
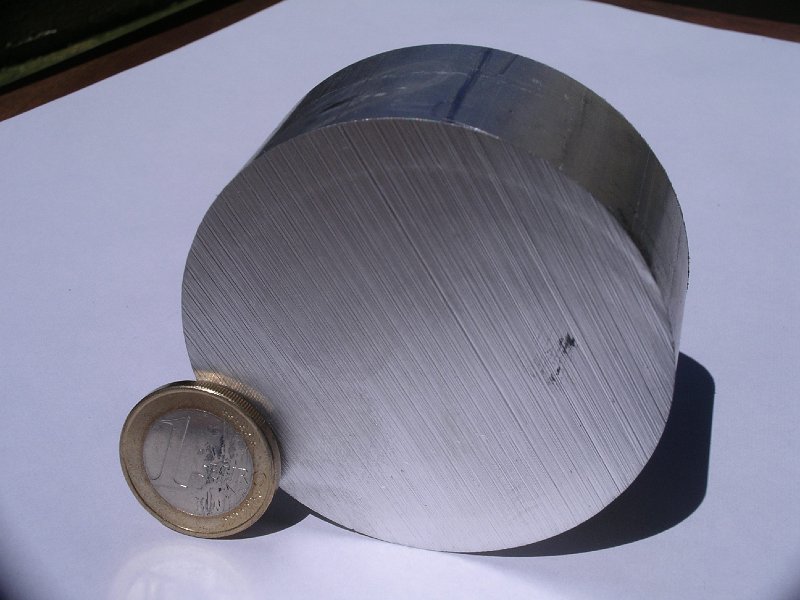
Da die Mecanum-Räder (aus den USA) natürlich in für uns Europäer völlig unevrständlichen Zoll-Maßen ;-) ankamen, galt es, sich eine Befestigung auf einer Achse auszudenken. Nach den ersten professionellen Skizzen ;-) wurde das ganze freundlicherweise von meiner Frau "nach CAD übersetzt" und an einem befreundeten Institut aus bei ebay erworbenem Aluminium professionell maschinell per CNC gefräst. Hier der Werdegang der Entstehung:
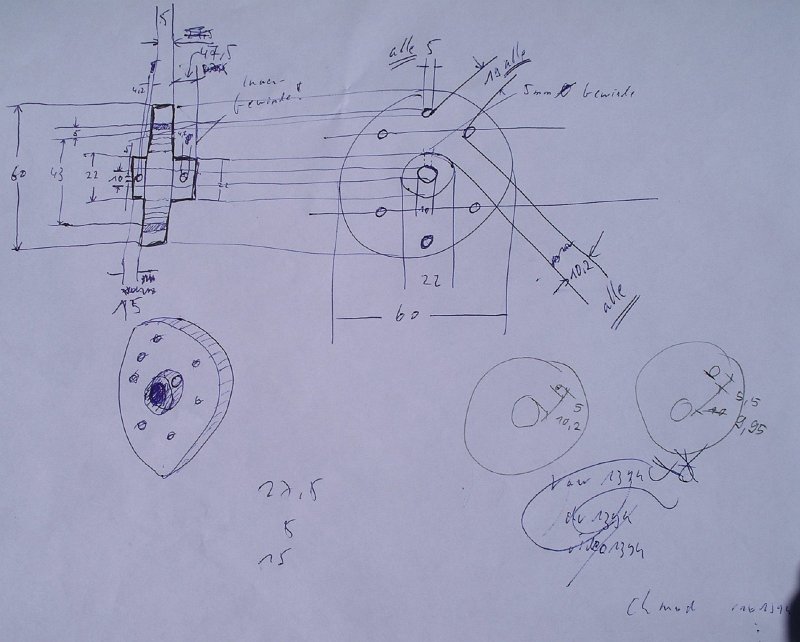

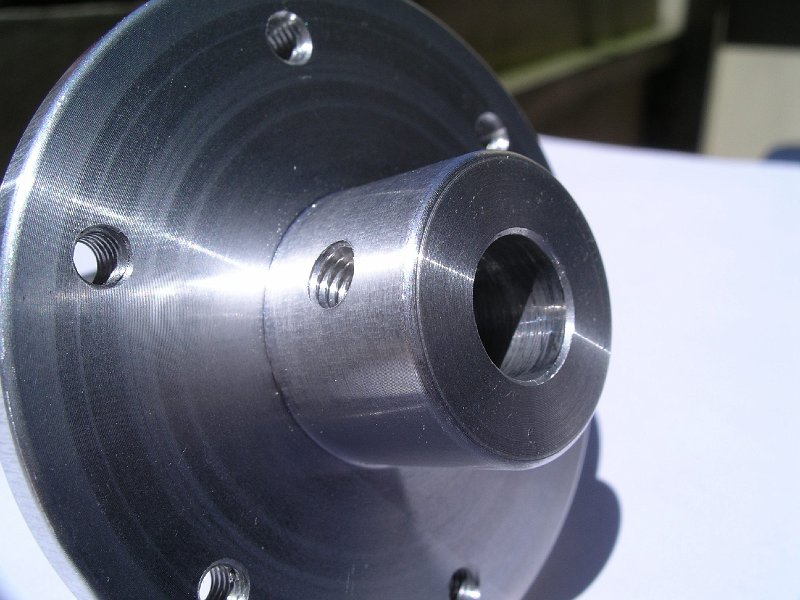
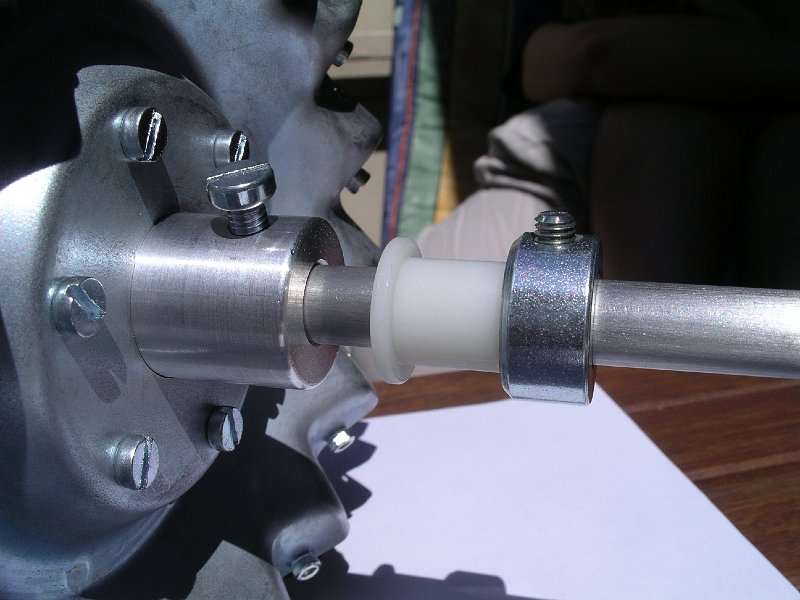
Zur Befestigung auf den Achsen wurden selbstschmierende Kunststofflagerbuchsen und Stellringe von GHW-Modellbau verwendet. Diese haben sich bereits mehrfach bewährt. Hier ein erster "Montage-Trockenlauf":