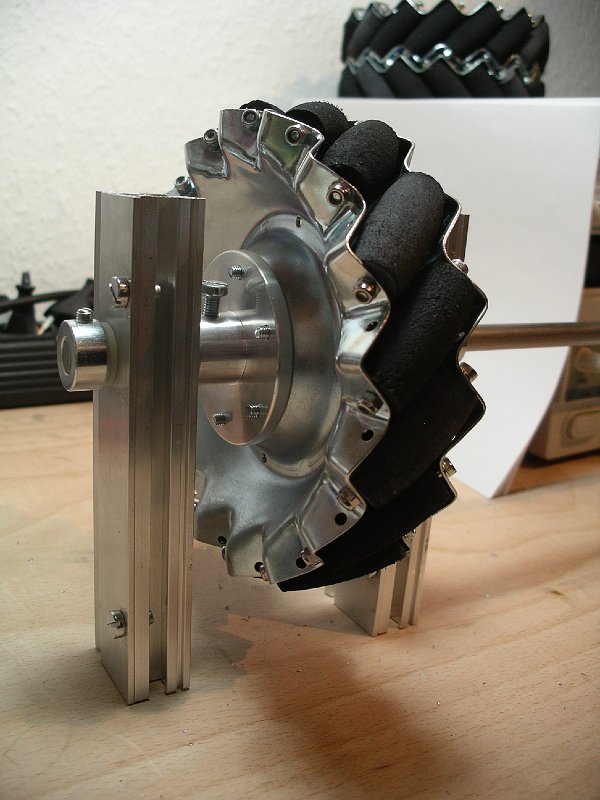
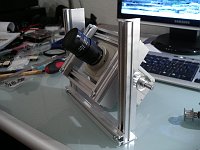
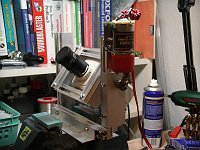
Für die vertikalen Halter der Radachsen wurden die bewährten Aliprofile von Kalms verwendet. Diese sind eigentlich aus dem 19"-Rack-Bereich oder für Flightcase-Bau, aber dafür verhältnismäßig günstig im Vergleich zu den teuren Profi-Bosch-Profilen. Für die Achs-Halter wurden einfach zwei Profile gegeneinander geschraubt

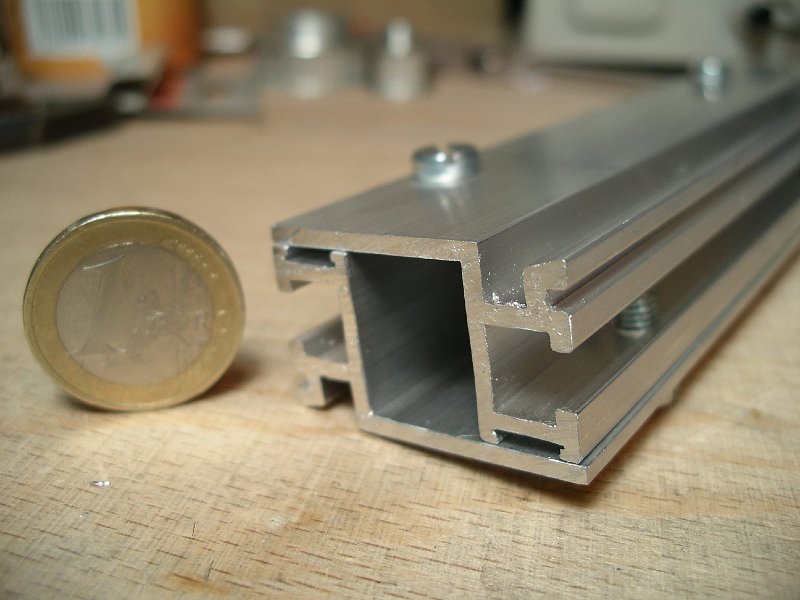

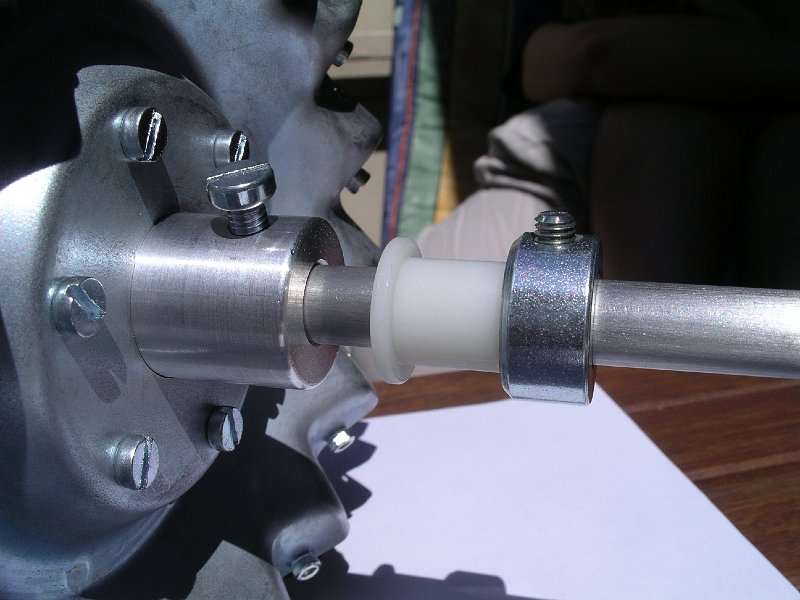
und mit der Kunststoff-Durchführung für die Achse versehen:



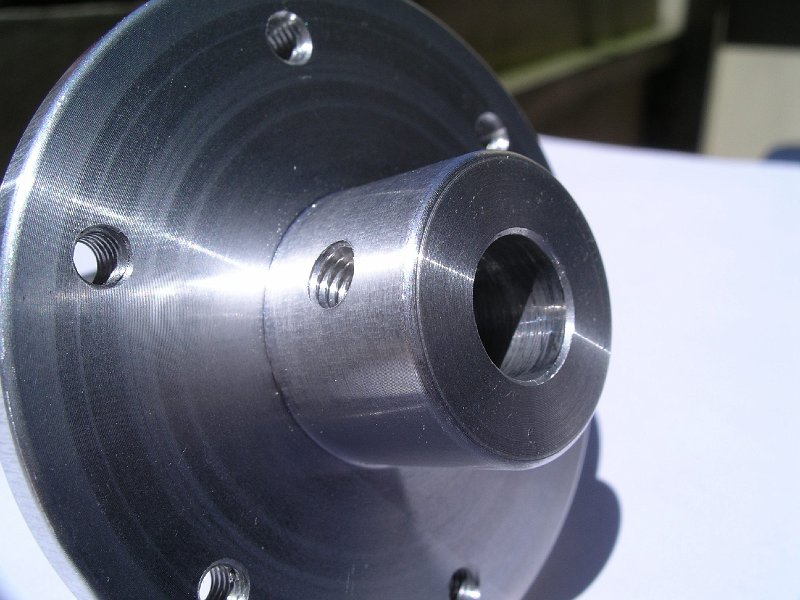
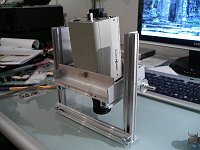
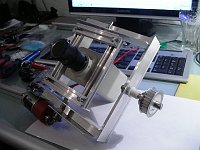
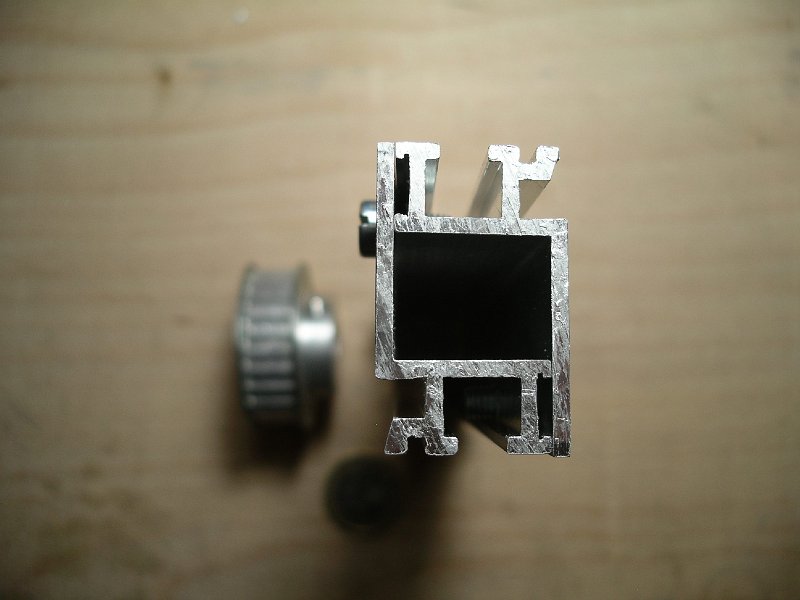
Dadurch wurden nun die gedrehten Rad-Halter gesteckt,


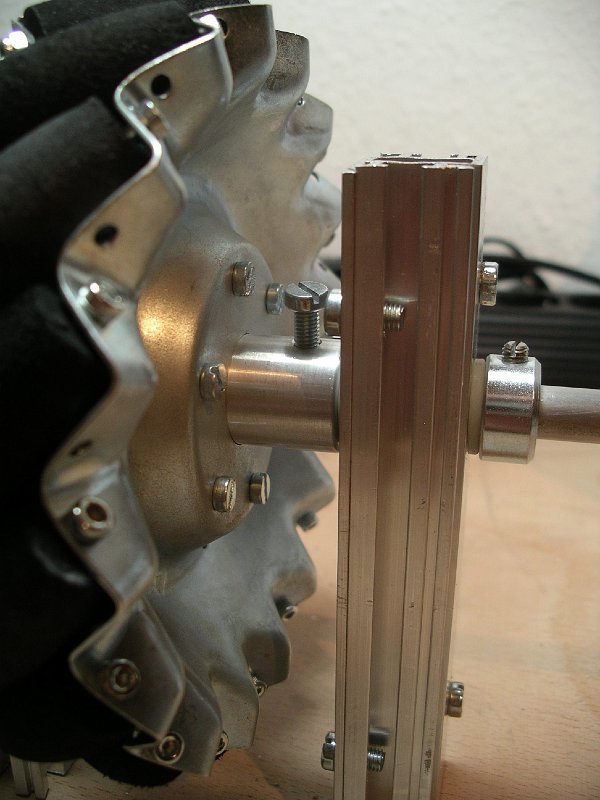
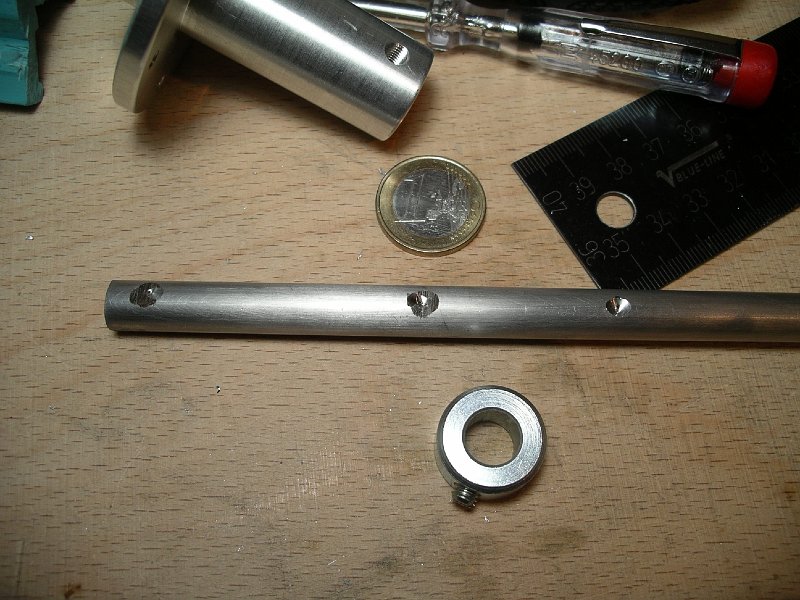
und die Achse angephast (oder besser "angebohrt"), damit die Stellringe auf der Achse ordentlich mit der Madenschraube festsitzen:


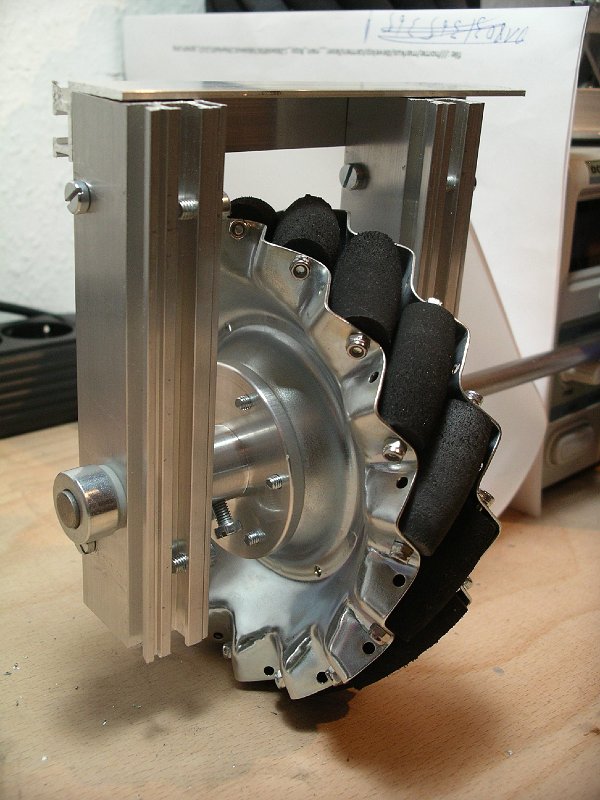
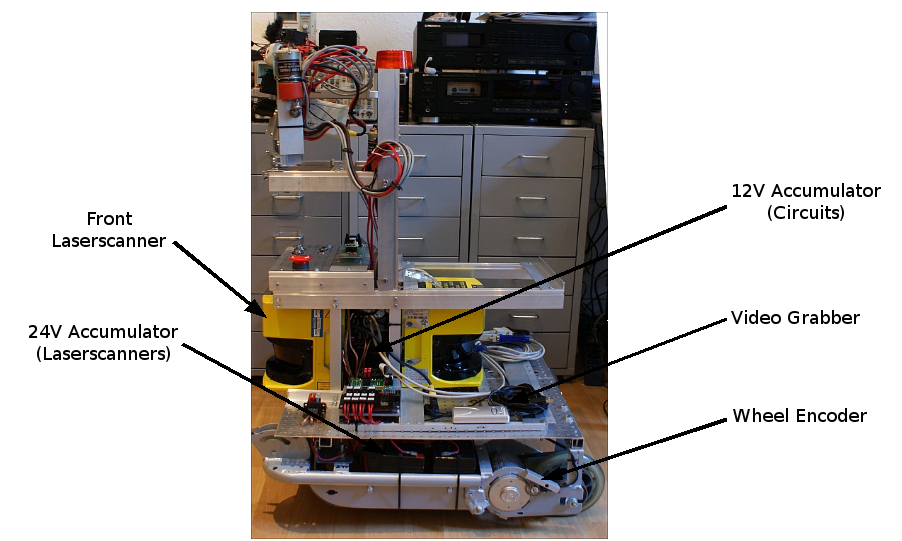
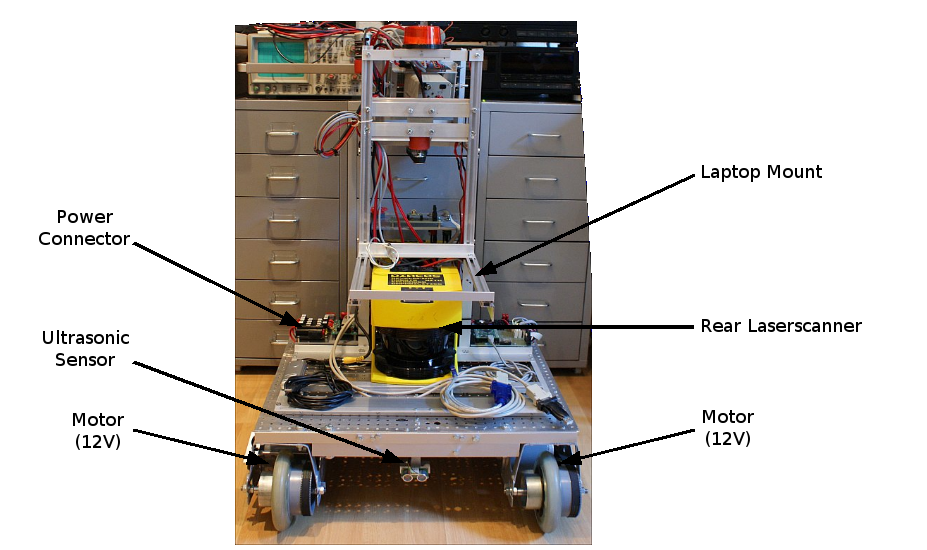
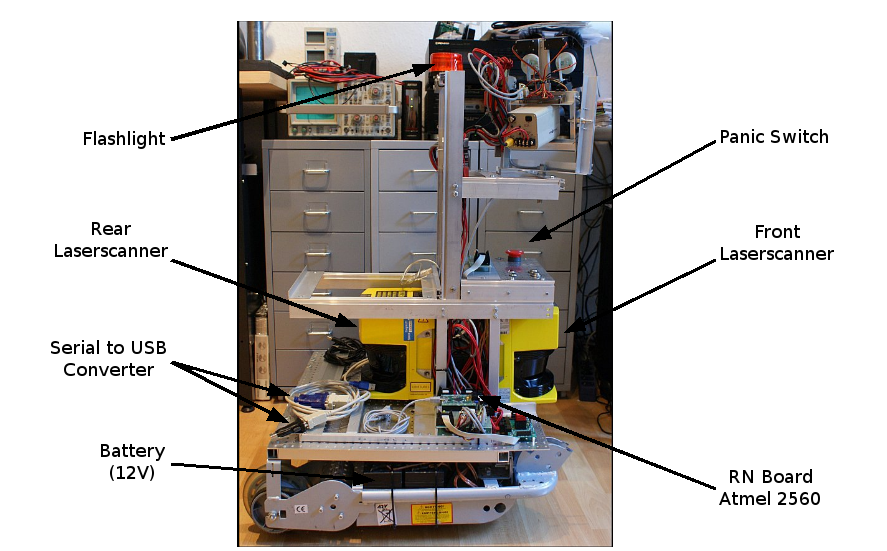
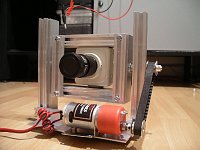
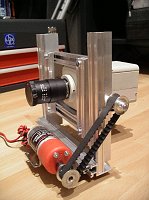
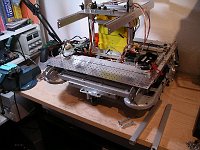
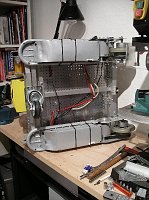
Und so ist das Ganze für eine der vier Roboter-Seiten dann gedacht: