Unterbodenbeleuchtung…? fragt sich sicher der ein oder andere. Inspiriert durch iRobots AVA Roboter fiel die Entscheidung, zwischendurch (um mal was zu bauen, was funktioniert ;-) ) eine RGB-Beleuchtung für den Roboter direcs1 zu entwickeln.

Quelle: http://www.botjunkie.com
Die Idee die dahintersteckt ist, verschiedene Zustände leicht signalisieren zu können; z.B. "rot=Hindernis" oder "grün=freie Fahrt". Zum Ansteuern von den ausgewählten RGB-LED-Streifen wurden sechs Optokoppler (4N33 813) auf die vorhandene Steuerplatine gelötet – gar nicht so einfach bei der Verkabelung:
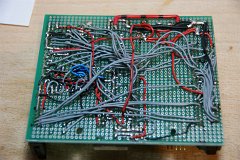

Die Optokoppler sind erforderlich um die LEDs zu schalten, die direkt an 12V angeschlossen werden können:



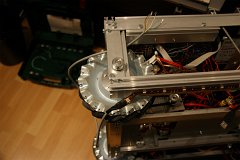
Nun galt es, die flexiblen LED-Streifen – die übrigens bei Pollin bestellt wurden – auf der Unterseite des Roboters zu montieren. Durch die Klebestreifen, die an den Streifen bereits dran sind, ist dieses sehr simpel. Auch kann die Meterware ca. alle 10 cm einfach mit der Schere geteilt werden. Praktisch. Hier die Fotos dazu:




Nicht ganz so einfach gestaltete sich das Verlegen der Anschlusskabel für die LED-Streifen am Bot. Aber lösbar:



Nun noch das Ganze für den zweiten Streifen:

Und so sieht der erste Test aus:








Wie man sieht, sind hier alle Farbkombinationen möglich, wenngleich erst einmal nur die offensichtlisten genutzt werden sollen wie "grün=freie Fahrt" oder "rot=Hindernis". Praktisch dabei: Es wurden die PWM-Anschlüsse des Atmel-Boards genutzt, so dass hier auch verschiedene Helligkeiten möglich sind. An diesen Portbits waren früher einmal Servos angeschlosssen. Darum existiert auch noch jeglicher Code in der Software zur Ansteuerung, nur dass eben sich nicht Servos drehen, sondern LEDs heller oder dunkler werden.
Und so sieht das Ganze dann im Betrieb aus (hier leider nur Fotos, bei denen nur eine Seite beleuchtet ist):




