|
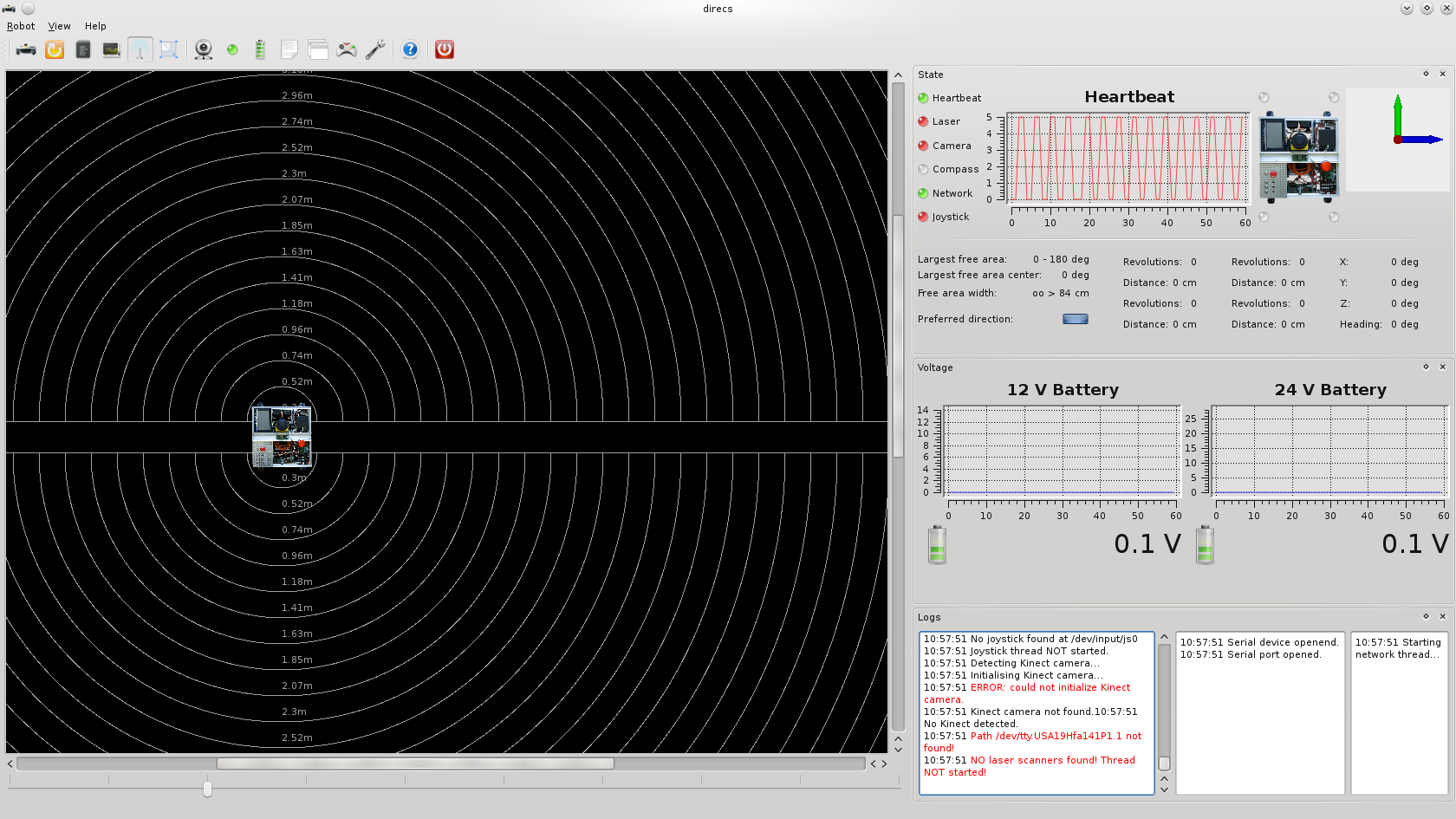
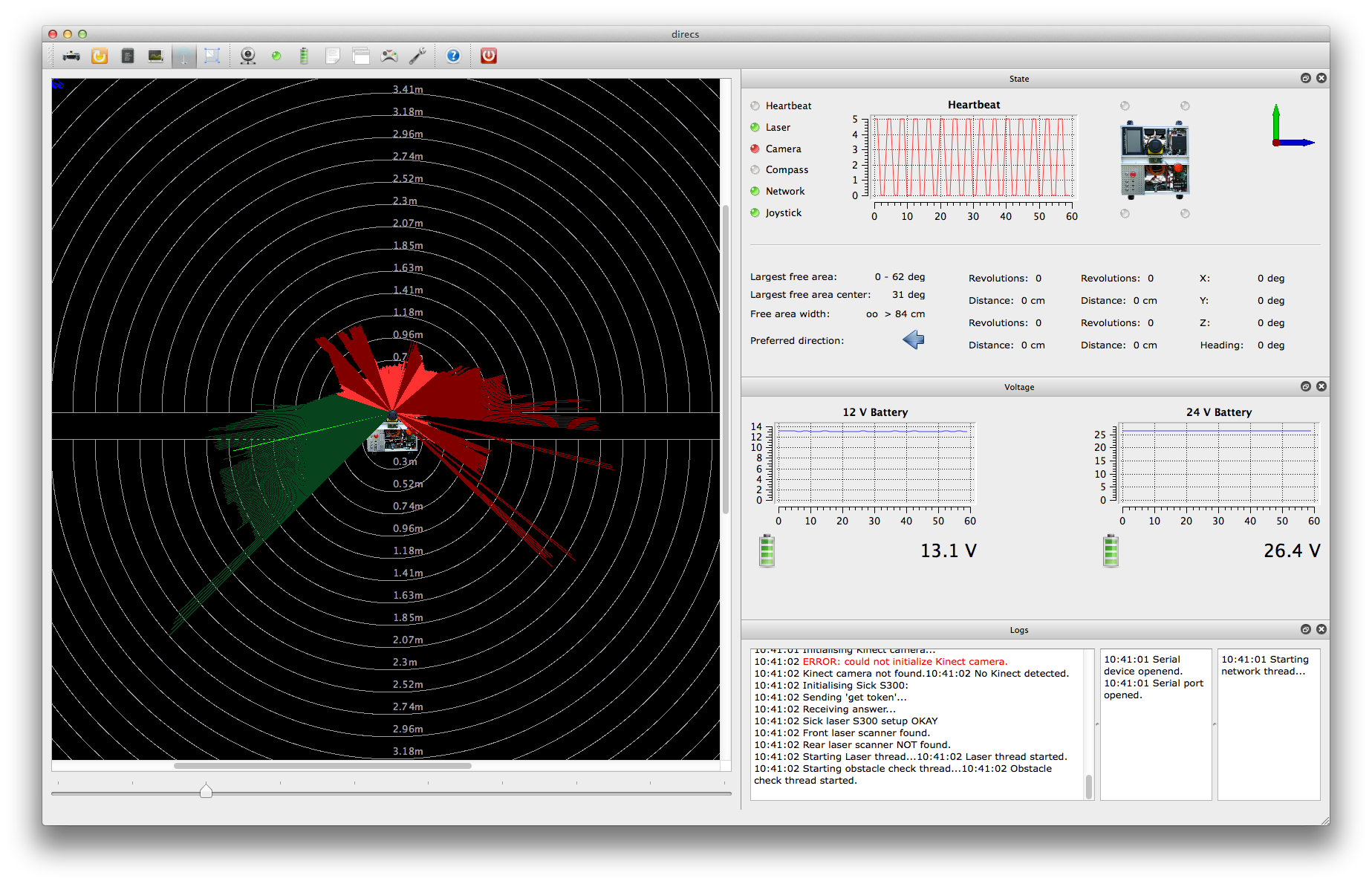
Zwei aktuelle Screenshots – einmal der erste Test mit dem neuen ARM-Board unter Linux in der Debian-VM (Parallels unter Mac OS X), der zweite nativ auf dem Mac. |
|
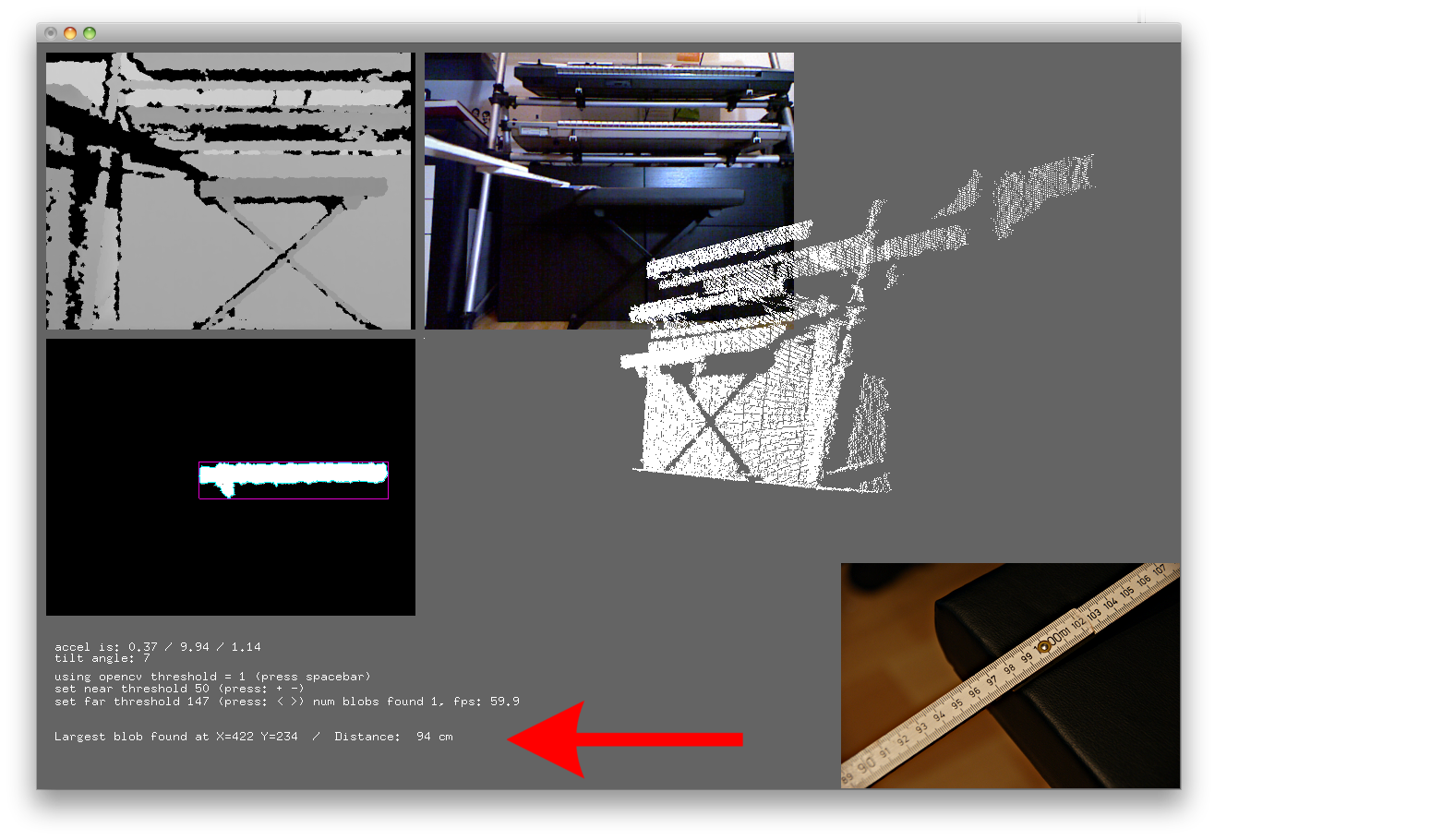
Erste Experimente mit der Microsoft Kinect Kamera und dem OpenKinect / libfreenect Sourcecode. |
|
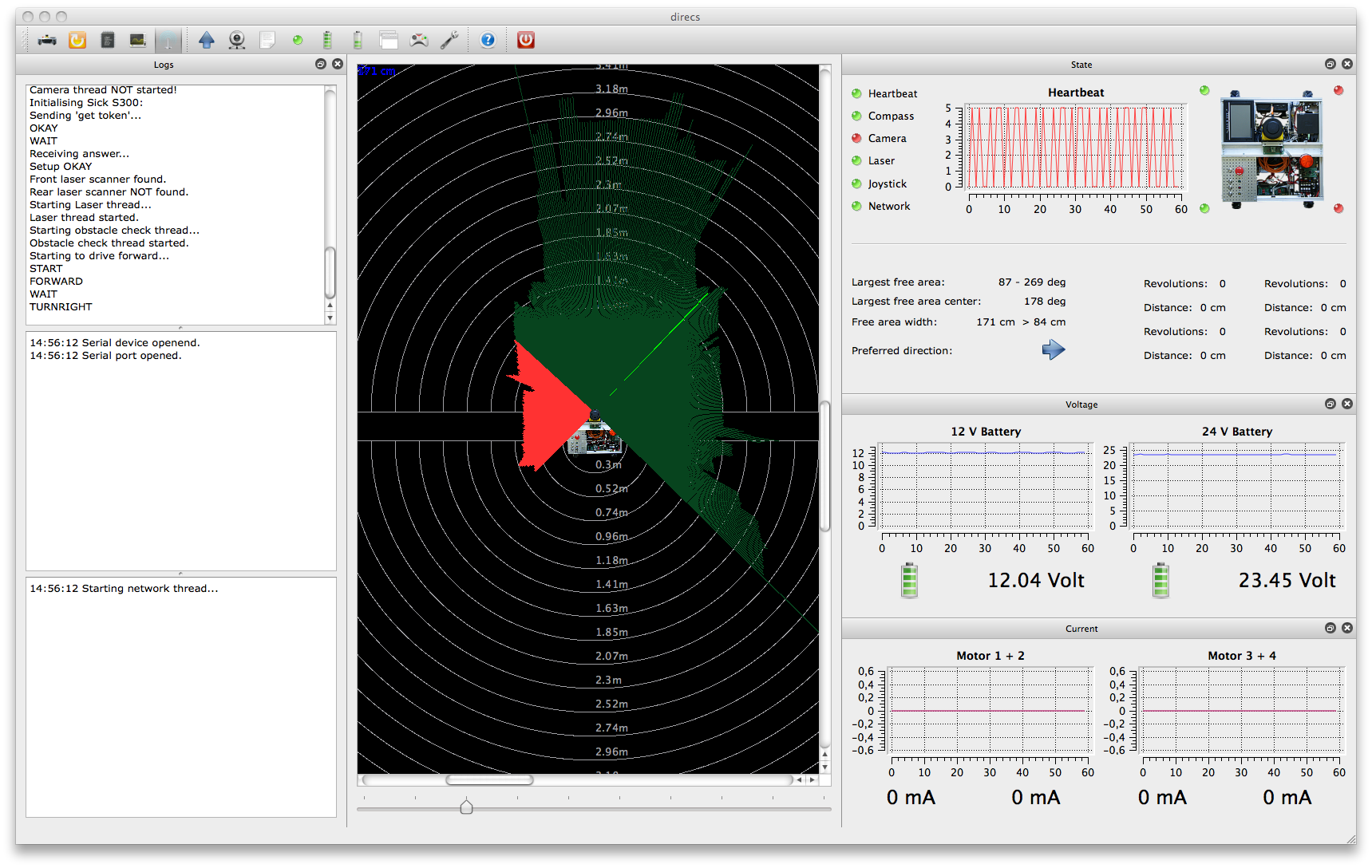
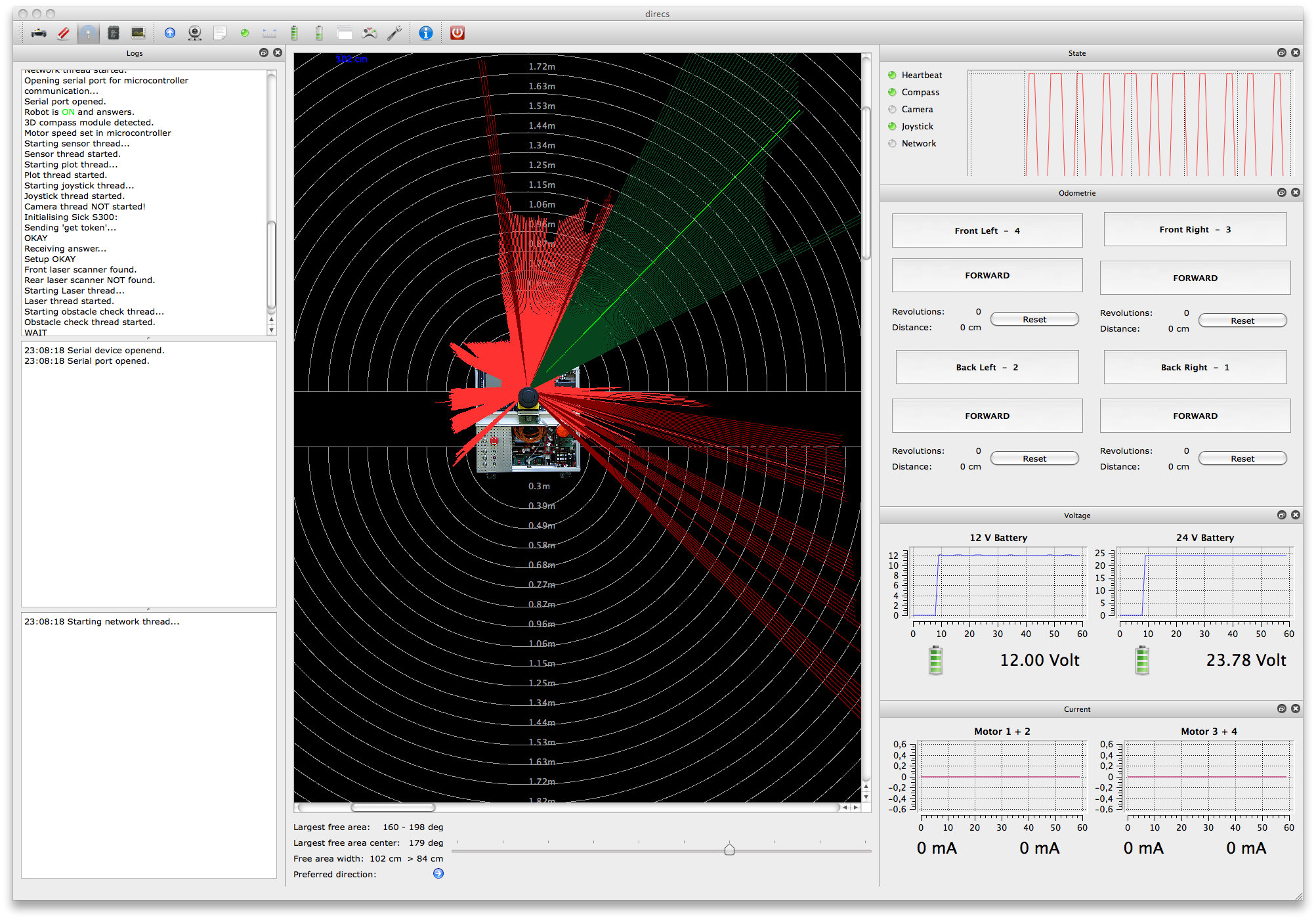
Größeres Redesing: Grafischen Heartbeat korrigiert, Roboter-Motor-Status wird nun grafisch rechts oben angezeigt (mit GUI LEDs), Änderung der Hauptfenstergröße zur Anzeigen auf dem MacBook Pro. |
|
Kleine Verbesserungen in der GUI: Grafische LEDs über den Zustand diverser Module im „state“ Bereich rechts oben, Gitternetzlinien innerhalb der Plot-Fenster (Batteriespannungen) und ein grafischer Heartbeat (rot). |
|
|