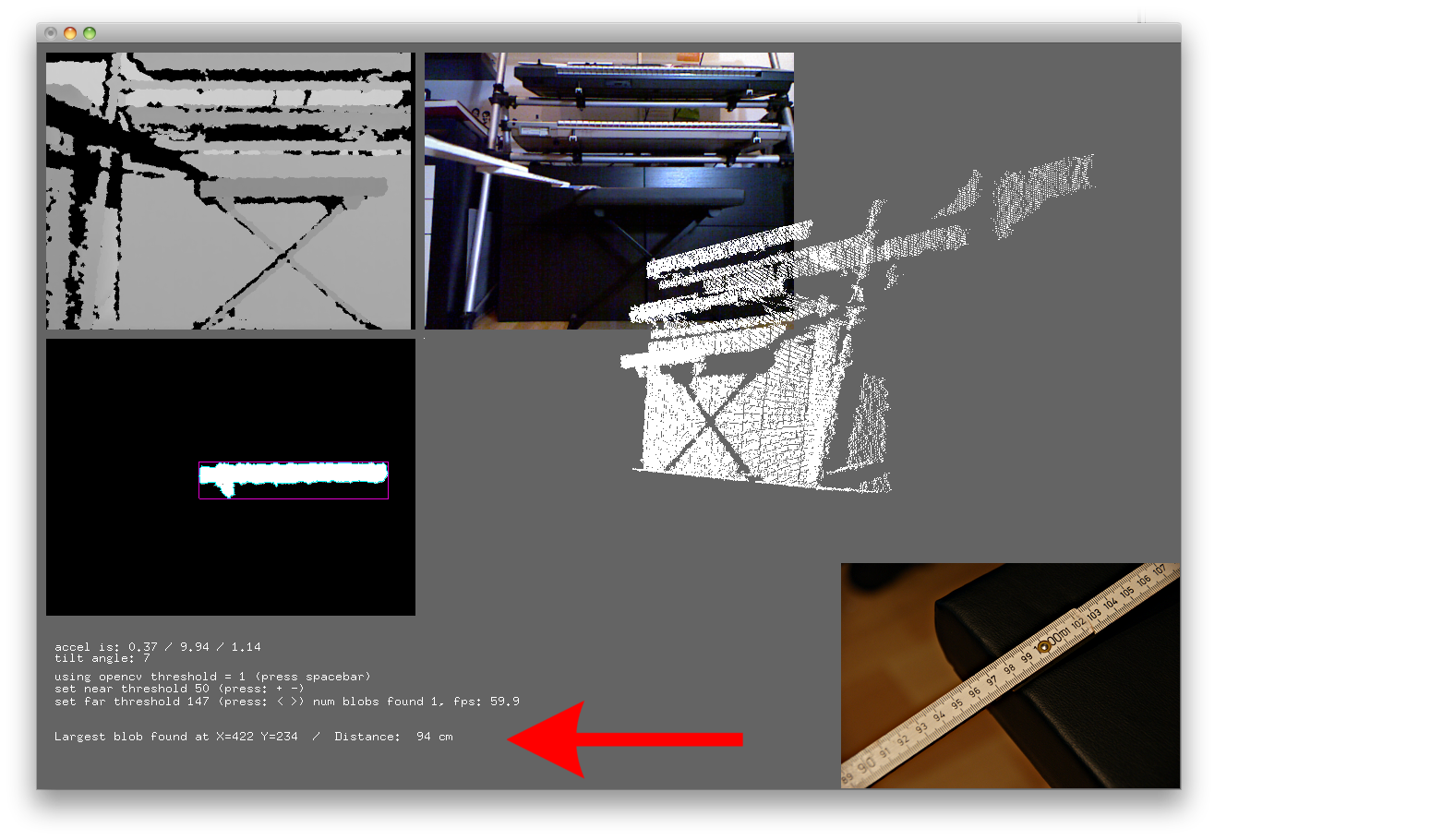
Beim Umstellen der seriellen Funktionen auf ASCII-Klartext-Anweisungen anstatt binärer Daten, stellte sich heraus, dass die Motoren nicht immer gleich auf die selben Anweisungen reagierten. Um sicher zu gehen, dass es kein Hardwarefehler ist – und weil ein Programmfehler nicht feststellbar war – wurde kurzerhand ein kleiner Analysestecker gebaut und alle Verbindungen insgesamt aufgetrennt um jedes elektrische Modul für sich sauber zu testen. Und so sah der Test dann aus:


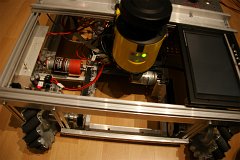
Wie mah sieht zeigt die grüne LED den Zustand des betreffenden Portbits des Atmel an. Zum einfacheren Testen wurden einfach ein paar LEDs mit je einem 1,5 k Ohm Vorwiderstand gegen Masse auf den betreffenden Pfostenverbinder gelötet:


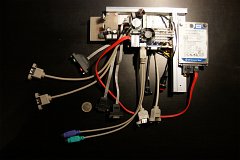
Das funktionierte offenbar wie gewünscht. Anschließend wurden umgekehrt die Eingänge der Motorcontrol-Boards jeweils per Drahtbrücken auf high gesetzt um zu sehen, ob die Motorcontrol-Boards beide ordentlich funktionieren. Das Wichtigste dabei: Eine ordentliche und aufgeräumte Testumgebung! ![]()

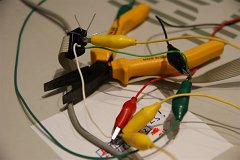
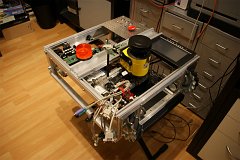
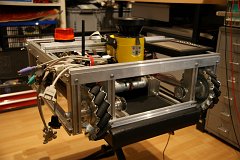
Spaß beiseite. Hintergrund dieser wilden Verkabelung ist natürlich, dass das Board "vor Ort" also in der Originalumgebung "im Roboter" getestet werden soll, also mit der gleichen Spannungsversorgung etc. Also wurde die Platinen nur soweit gelöst, dass man an die betreffenden Stecker ordentlich ran kommt und etwas unter die Platinen gelegt, damit es keine Kurzschlüsse gibt.
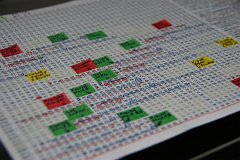
Nun wurden endlich auch die letzten Stecker und Kabel bei der Gelegenheit beschriftet – wo sowieso schon mal alles auseinander gebaut war:




Ergebnis: Interessanterweise wurde kein Fehler gefunden und nach dem Zusammenbau funktionierte alles wie gewünscht – ohne was geändert zu haben. Irgendwie seltsam… ![]()