Okay, vielleicht nicht gefesselt, aber so ganz habe ich mich noch nicht getraut ihn los fliegen zu lassen. Aber seht selbst:
Okay, vielleicht nicht gefesselt, aber so ganz habe ich mich noch nicht getraut ihn los fliegen zu lassen. Aber seht selbst:
Es ist soweit, heute erfolgte ein erste Test des neuen Quadkopters – natürlich noch drinnen.
Hier nun ein Test der neu montierten Motoren, mit en neuen ESCs und einem Servotester. Sieht doch schon recht vielversprechend aus:
Ach so, hier kann man im Detail sehen, wie das Teil angeschlossen wird.
Auf dieser Seite soll der allgemeine Aufbau meines neuen Mikrokopter dargestellt werden. Der Name des Kopters lautet übrigens recopter1. Und das sind die Bestandteile bisher: Allgemeiner Aufbau „recopter1“ weiterlesen
Um mit dem Mikrokopter-Fliegen etwas Übung zu bekommen und um ein wenig Spaß auch in der Wohnung zu haben, habe ich mir einen echt kleinen und günstigen Mikrokopter gekauft: Den Ladybird V2 von Walkera. Und so sieht er aus (ohne „Haube“):
Da ja der letzte Rahmen ruckzuck zerstört wurde, musste ein neuer her. Und so sieht er aus (hier noch mit den falsch bestellten Motoren). Es ist natürlich der hintere. ;-)

Gekauft habe ich ihn übrigens bei Hobbyking. Es bietet zwar nicht mehr die Möglichkeit einen Hexakopter zu bauen, aber dafür kann man die Ausleger schön für den Transport einklappen.
Beim ersten Einklappen ist dann auch gleich eine der „Einrastungen“ gebrochen. Erfreulicherweise nur die Raste zum Transport, nicht die zum Fliegen. Zurücksenden nach China lohnt hier nicht wirklich – Preis des globalen Dorfes im world wide web…


Ich habe jedoch bisher auch nicht den Eindruck, dass der ganze Rahmen nichts taugt. Mal sehen…
Zwei Bilder sagen mehr als tausend Worte:


Was war geschehen?
Spät nachts wollte ich den Kopter wie hier im Video kurz vorführen. So weit, so gut. Aber irgendwie reagierte der Mikrokopter nicht. Und nun die zwei Fehler, die mir einen echt tiefen Schnitt im Ringfinger einbrachten:
Genauer: Die selbst geschriebene Software auf dem ARM-Board macht(e) nach einem Reset für zwei Sekunden ein bestimmtes Signal an die ESCs. Und zwar: Zwei Sekunden Vollgas.
Das erklärt es wohl. Der Kopter gab also „ohne Vorwarnung“ zwei Sekunden unkontrolliert und mit der vollen Strompower des 5000 mAh/30C-Akkus Vollgas!
Tja, da half auch der refexartige (dämliche) Griff in den Kopter nichts (um ihn vom Abheben aufzuhalten).
Merke: Nicht Freitagnacht nach einem langen Arbeitstag und einem langem Podcast müde versuchen eine Mikrokopter zum Laufen zu bringen…
Im Ergebnis kann ich letztendlich froh sein, dass es nur eine kleine Schnittwunde gab und keines der im ganzen Arbeitszimmer verteilten, extrem zersplitterten Propeller nicht ins Auge gelangt sind.
Der Kopter ist übrigens fast komplett hin: Verzogener Rahmen, gebrochene Landebeine. Der Mikrokopter ist tot, es lebe der Mikrokopter. ;-)
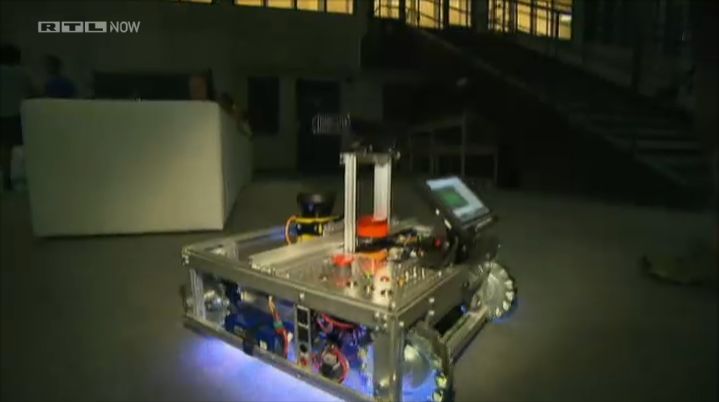
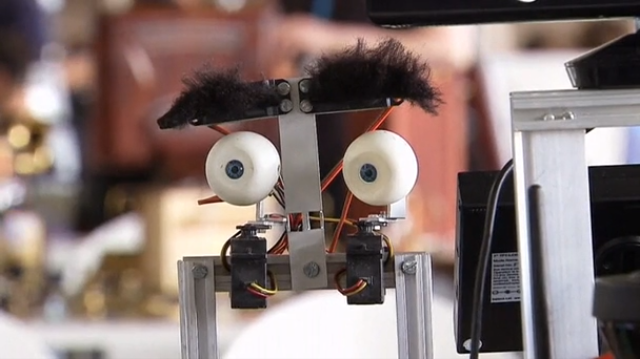
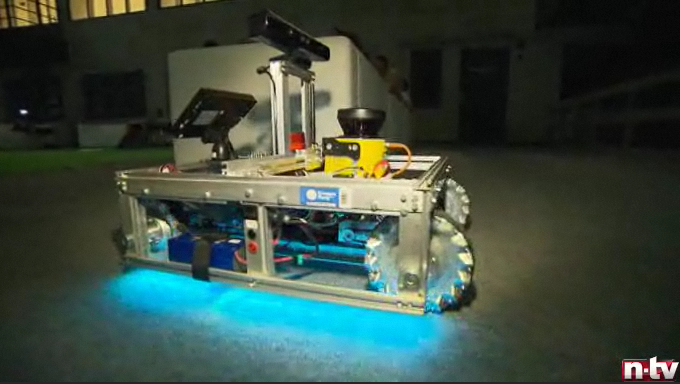
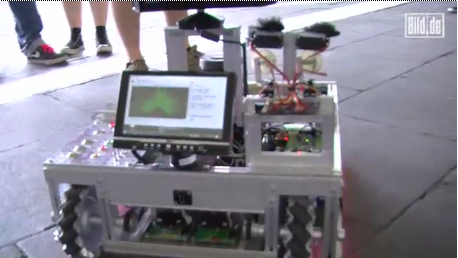
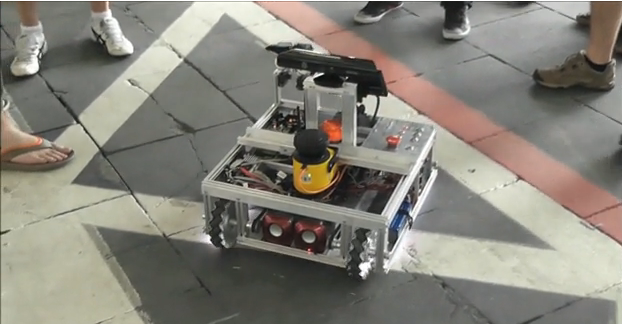
Präsentation meines Roboters direcs1 auf der Campus Party 2012. Gesprächspartnerin ist Neelie Kroes – Vizepräsidentin der Europäischen Kommision und Präsidentin der Digitalen Agenda für Europa:
Best of Robots Show – Part 1:
Best of Robots Show – Part 2:
Best of Robots Show – Awards Ceremony:
Hier die Links zu den derzeit verfügbaren Berichten über die Campus Party 2012 in Berlin mit meinem Roboter „direcs1“.