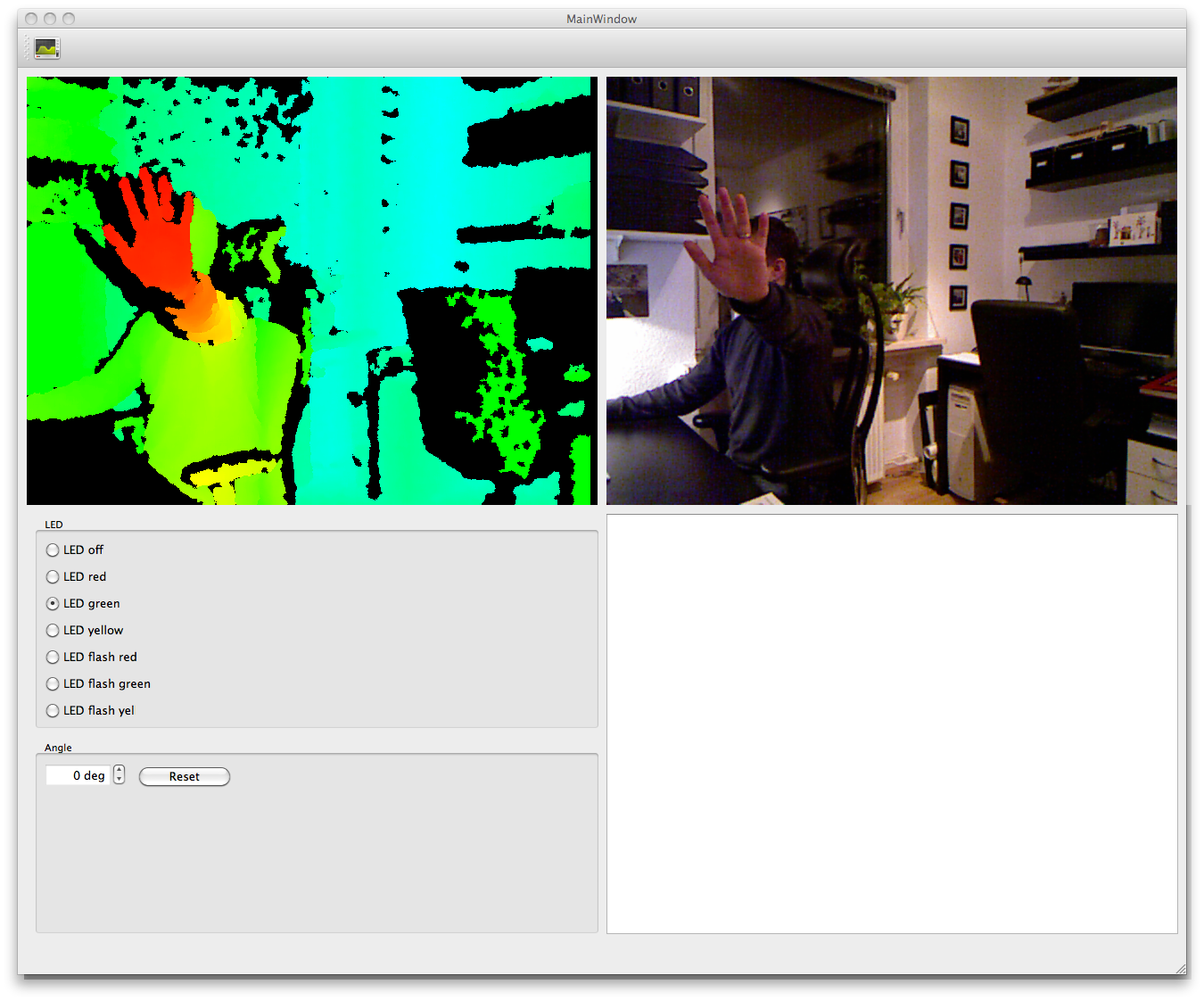
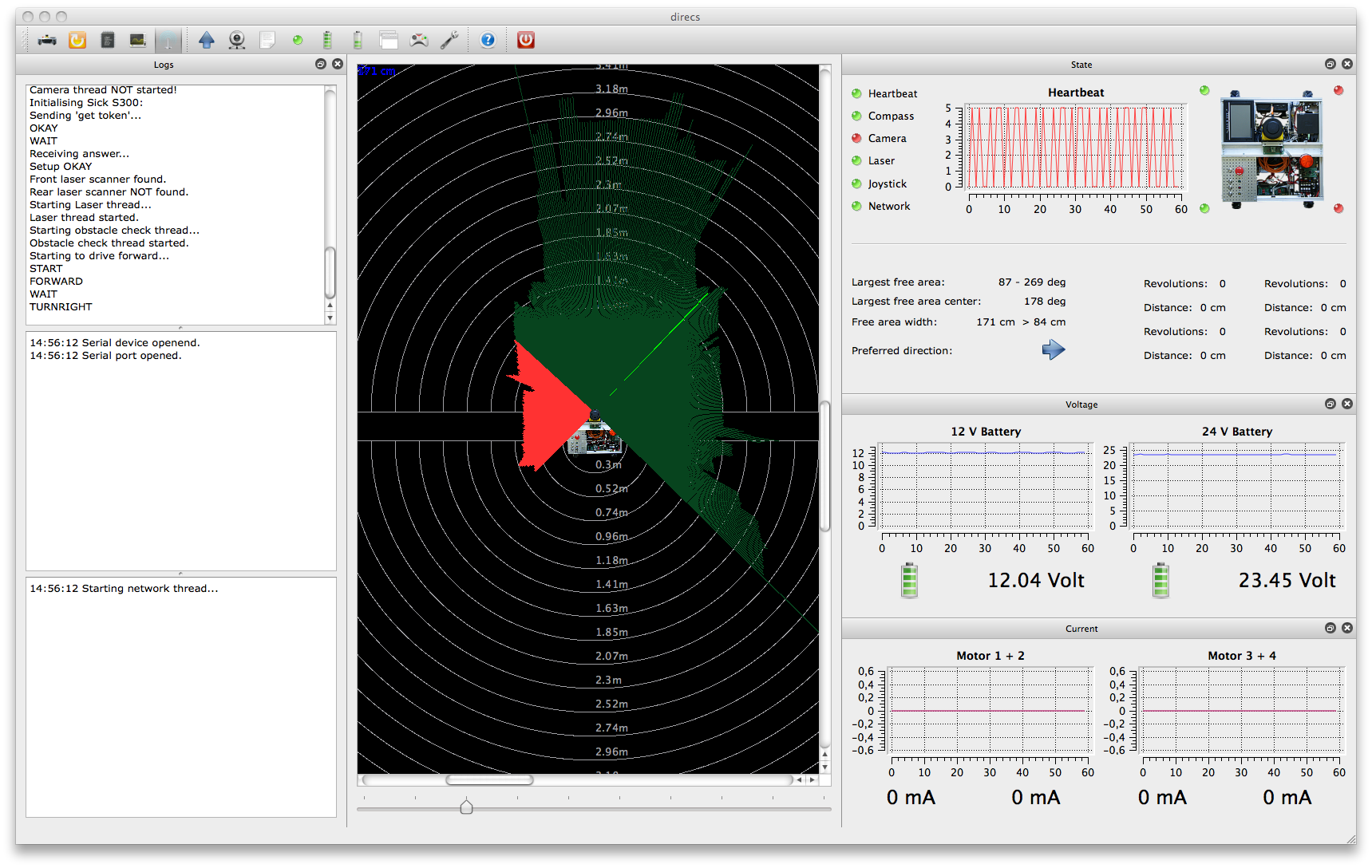
Die Integration des Kinect-Bildes geht voran. Sowohl das Live-Bild, als auch das "Tiefenbild" wird nun in der GUI angezeigt. Und hier die ersten Tests:
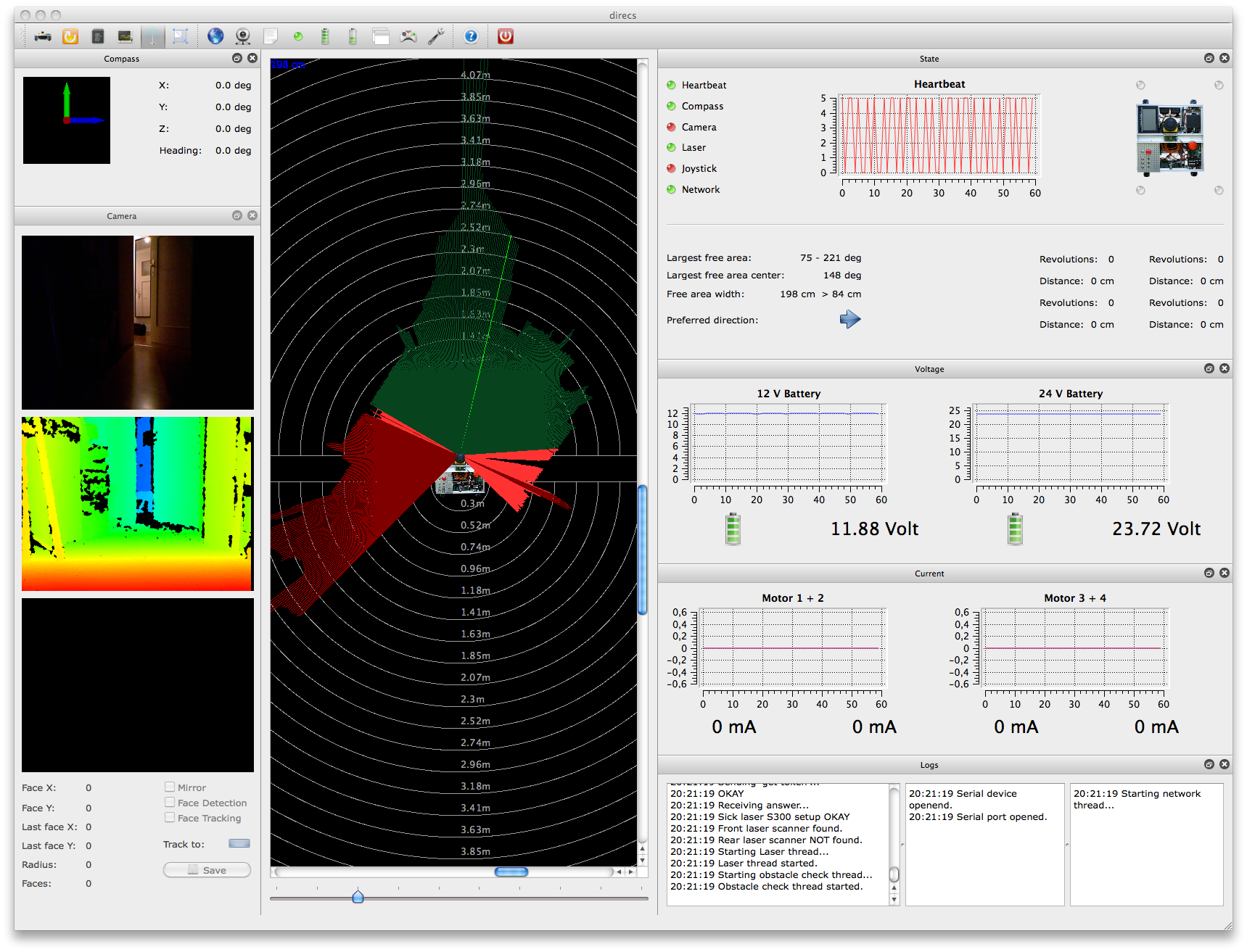
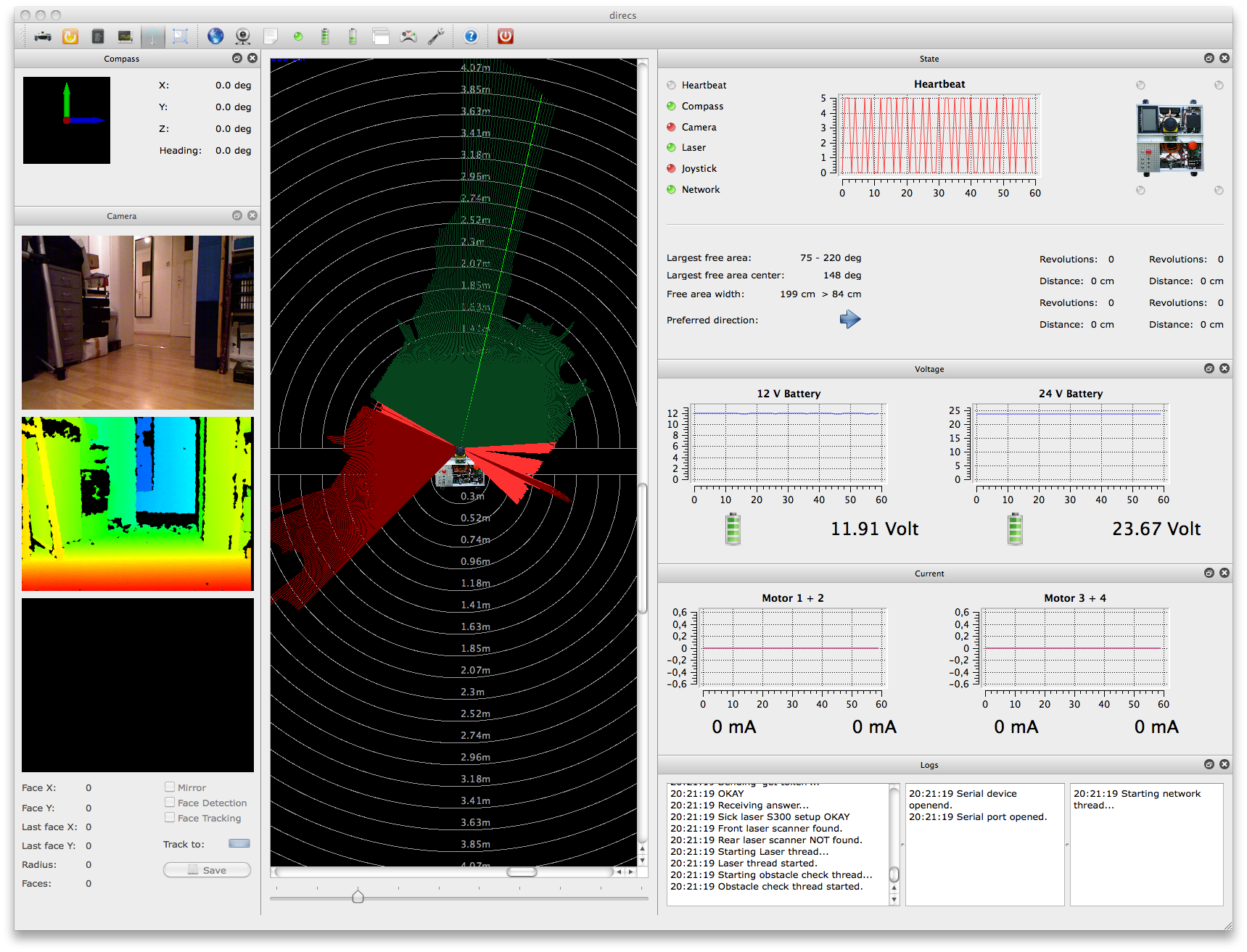
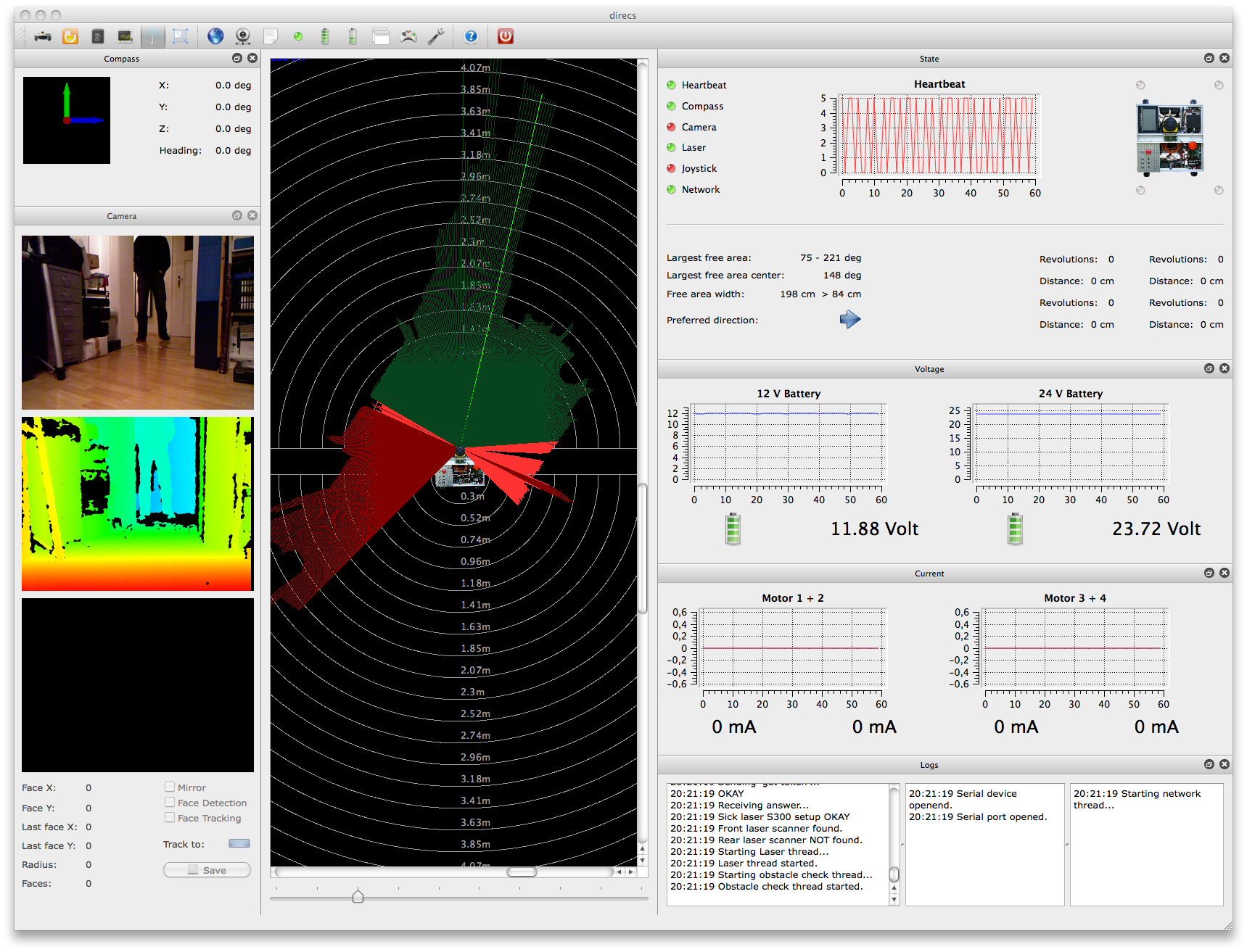
Wie man sieht, ist auf dem ersten Bild eine leicht geöffnete Tür (zum Flur) erkennbar – sowohl auf dem "original" Livebild der Kamera, als auch an den grünen Laserlinien und im Tiefenbild der Kinect; erkennbar am blauen Bereich. Im zweiten Bild sieht man die geöffnete Tür. Auf dem dritten ist sowohl auf dem Kamerabild also auch bei den Laserlinien eine Person gut erkennbar.