Eine kleine Bastelei zwischendurch: Floppy-Music-Drive!
Inspiriert durch dieses Video und diese bei den Pin-Belegungen etwas unklare Anleitung entstand hier nun meine Anleitung. Floppy-Musik mit Arduino – inkl. Midi-Unterstützung weiterlesen
Eine kleine Bastelei zwischendurch: Floppy-Music-Drive!
Inspiriert durch dieses Video und diese bei den Pin-Belegungen etwas unklare Anleitung entstand hier nun meine Anleitung. Floppy-Musik mit Arduino – inkl. Midi-Unterstützung weiterlesen
Wie bereits zuvor erläutert, soll der von der Graupner-Fernbedienung gesteuerte Arduino mit dem Raspberry Pi per I2C kommunizieren. Der hier beschriebene Lösungsansatz ist übrigens vollständig hier herunter ladbar:
/recopter/arduino/graupner1/recopter/recopter.ino für den Arduino
/recopter/raspberry_pi/i2c/recopter.py für den Raspberry Pi
Wie man an der Dateiendung .py erkennt, handelt es sich bei dem Code für den RasPi um die Programmiersprache Python. Aber der Reihe nach.
recopter3 – Kommunikation mit I2C zwischen Arduino und Raspberry Pi mit Python weiterlesen
Wie bereits erwähnt, soll nun die Technik bzw. der Sourcecode hinter dem gezeigten schematischen Aufbau meines Projekt eines autonomen Mikrokopters recopter3 erläutert werden. recopter3 – Kommunikation von Graupner über Arduino zum Raspberry Pi weiterlesen
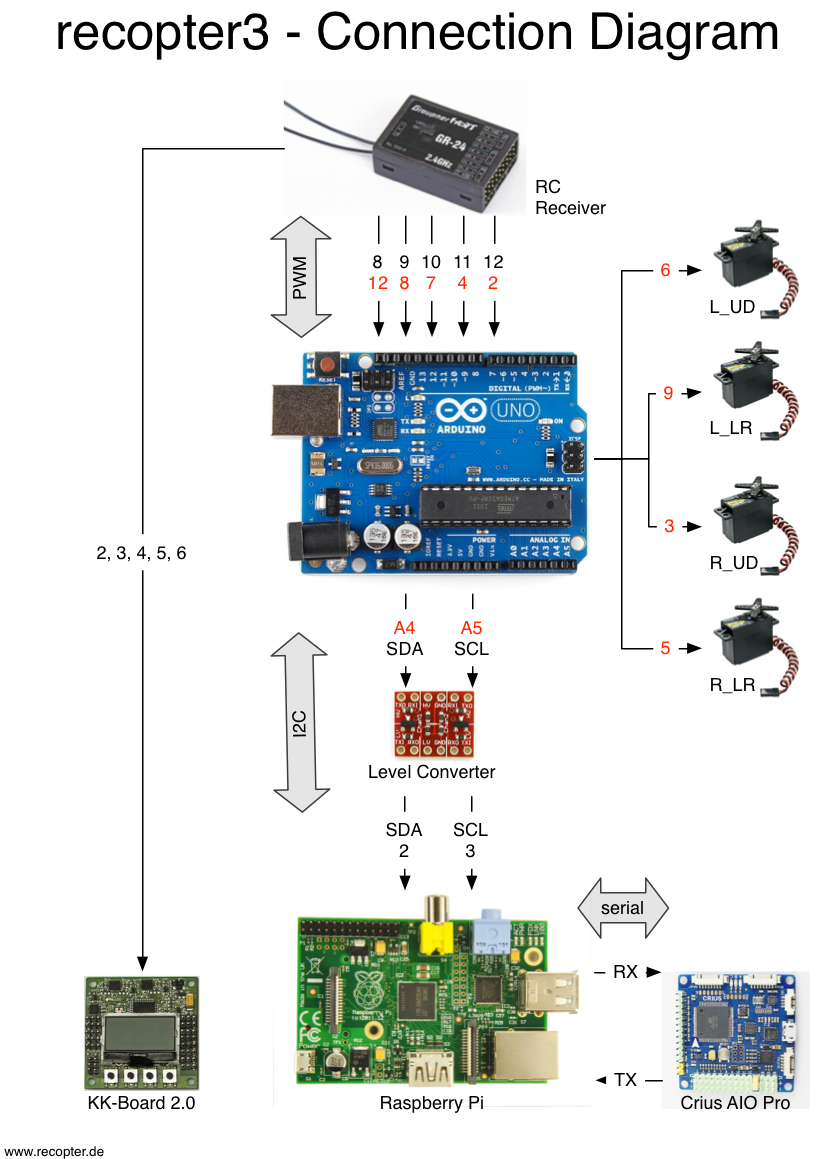
Anmerkung: Das KK-Board im Diagramm entfällt in Zukunft und wird durch das Crius-Board ersetzt!
Und wie das ganze funktioniert – inkl. Sourcecode – ist hier beschrieben.
Am 3. August 2013 fand zum ersten Mal in Deutschland die Maker Faire in Hannover statt und wir waren dabei. Eine Vorstellung unserer Projekt findet ihr weiter unten.
Und ein paar Fotos – inklusive einer Vorführung im Laser Zentrum Hannover – findet ihr im Menü unter Events. Oder eben genau hier verlinkt.
Eine Aufzeichnung des Livestreams unseres Podcasts Robotiklabor haben wir übrigens auch gesendet! Hört doch mal rein – nur 45 Minuten.
Und hier noch ein Video von uns erstellt:
Maker Faire 2013 in Hannover – mit Fotos und Video weiterlesen
Alle Fotos der Campus Party Europe 2013 in London findet ihr hier.
Einen Bericht über die CP könnt ihr in meinem Podcast Robotiklabor in Ausgabe RL028 hören. Hier geht’s los.
Bereits Ende August wurden die letzten Verkabelungen am Mikrokopter recopter3 durchgeführt. Alles ‚wie immer‘ kurz vor Toresschluss. Genauer: Vor dem Besuch der Campus Party 2013 in London.
Wie man auf den folgenden Fotos sieht, galt es noch die komplette Stromversorgung für den Raspberry Pi, den Arduino, der Servos (die ‚Augen‘) und den Lautsprecher zu verlegen und an einen zweiten Stromkreis (Akku) anzuschließen. Der Vorteil ist dabei, dass der ‚Regelkreis‘ komplett von Störeinflüssen des Stromkreises der Motoren unabhängig ist. Der Nachteil ist natürlich zusätzliches Gewicht durch einen zweiten Akku. Aber nun die Bilder der Verkabelung:
 recopter3 – Verkabelung der Steuerungselektronik weiterlesen
recopter3 – Verkabelung der Steuerungselektronik weiterlesen
So, nun ein paar weitere Details und Fotos zu recopter3, die teils schon Anfang August stattfanden. Ziel ist es, einen mehr oder weniger autonom fliegenden Mikrokopter zu bauen.
Mehr oder weniger deshalb, weil zur Sicherheit erst einmal mit einigen Funktionen, wie z.B. „nicht gegen Hindernisse fliegen“ gestartet wird. Auch ist vorerst geplant den Kopter manuell zu starten. Und, das wichtigste: Jederzeit in der Lage zu sein, die Automatik zu unterbrechen und wieder volle Kontrolle über das Fluggerät erlangen zu können!
Um dabei auch ein bisschen Spaß zu haben, werden noch ein paar extra Gadgets an Board sein, wie z.B. Lautsprecher und die Servo-Augen, vom alten Roboter mrs1.
Vor allem aber, wird mit dem Ansteuern der Gadgets gestartet, da ein autonomer Kopter nicht „mal eben so“ von Grund auf selbst zu entwickeln ist und das ganze ja auch noch Spaß machen soll. Außerdem hat sich der Funfaktor von einem „Lärm machenden Gefährt“ durchaus bewährt, sprich, kam gut bei Laien an.

recopter3 – Das Projekt! (ein autonomer Mikrokopter) weiterlesen
Pünktlich zur ersten deutschen Maker Faire in Hannover hat der NDR freundlicherweise ein Interview mit mir gemacht:
(Quelle und Rechte: NDR)
Und hier noch eine Galerie mit ein paar netten Beschreibungen auf der Seite des NDR.

