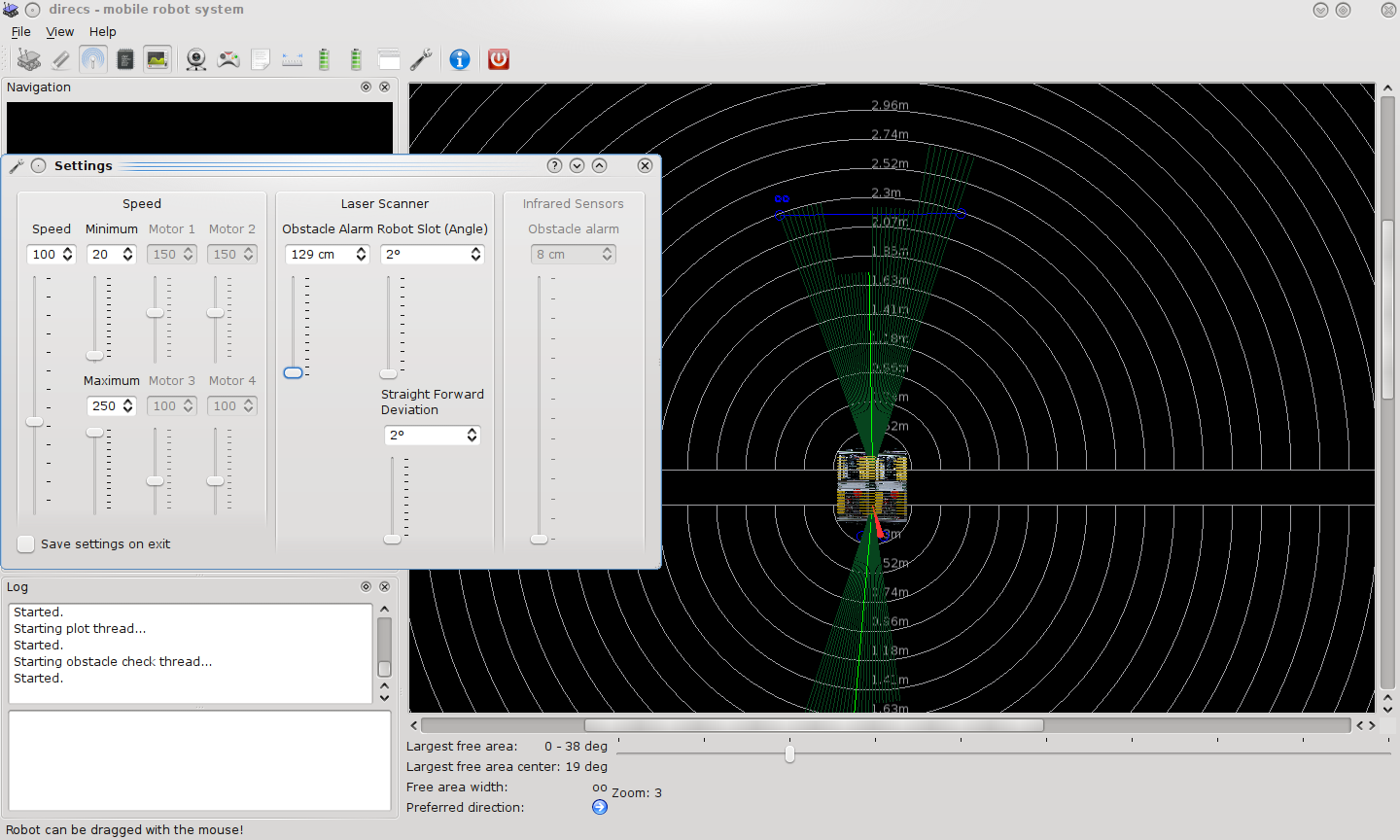
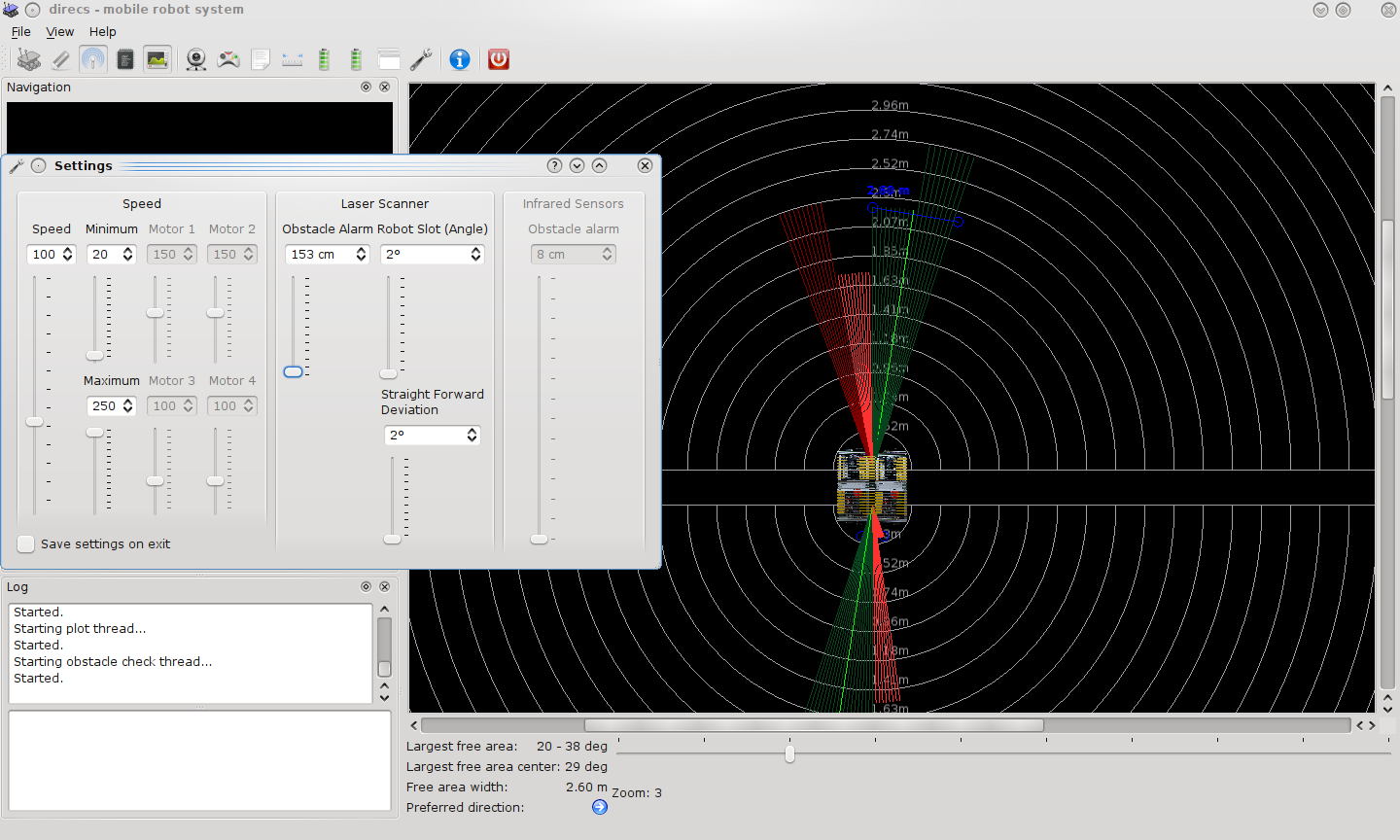
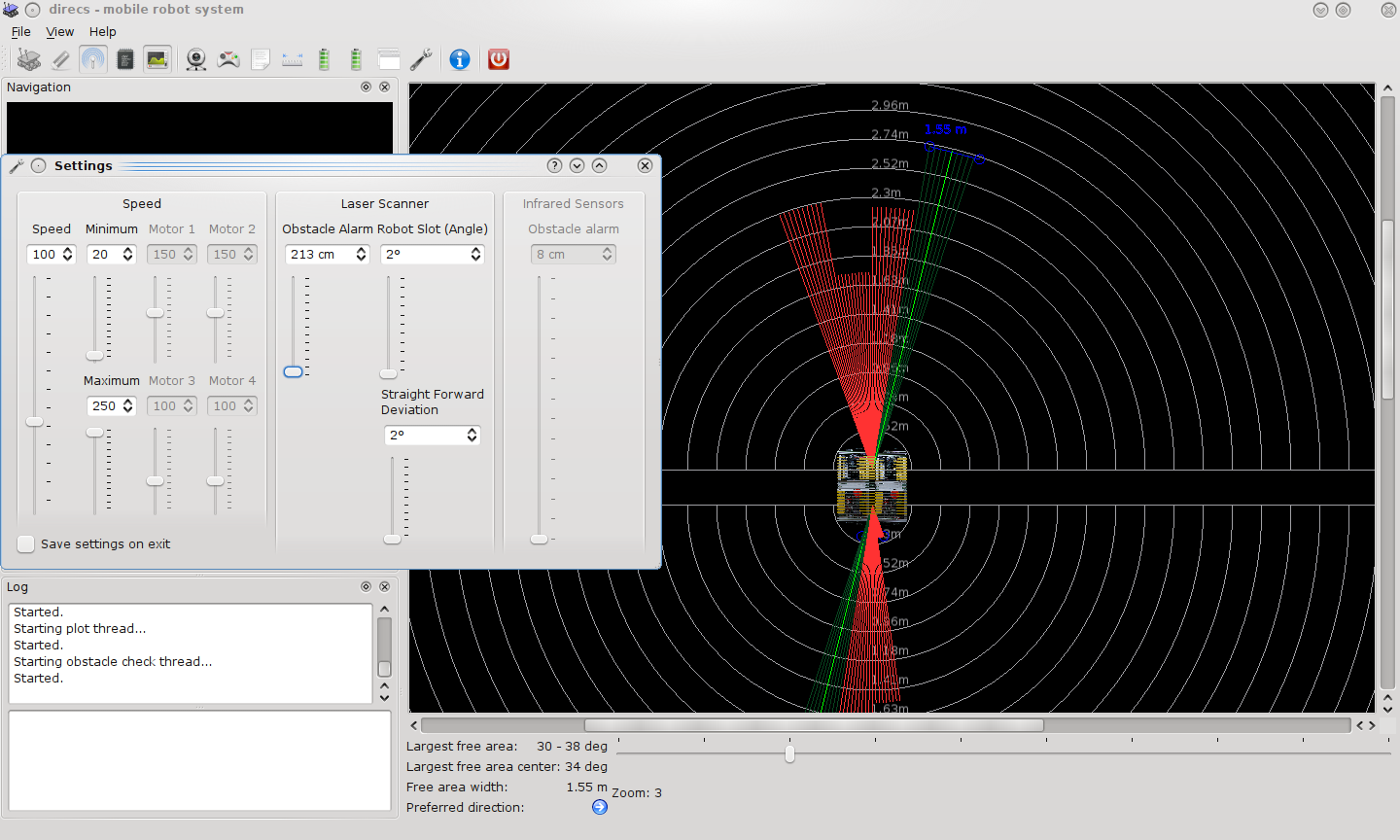
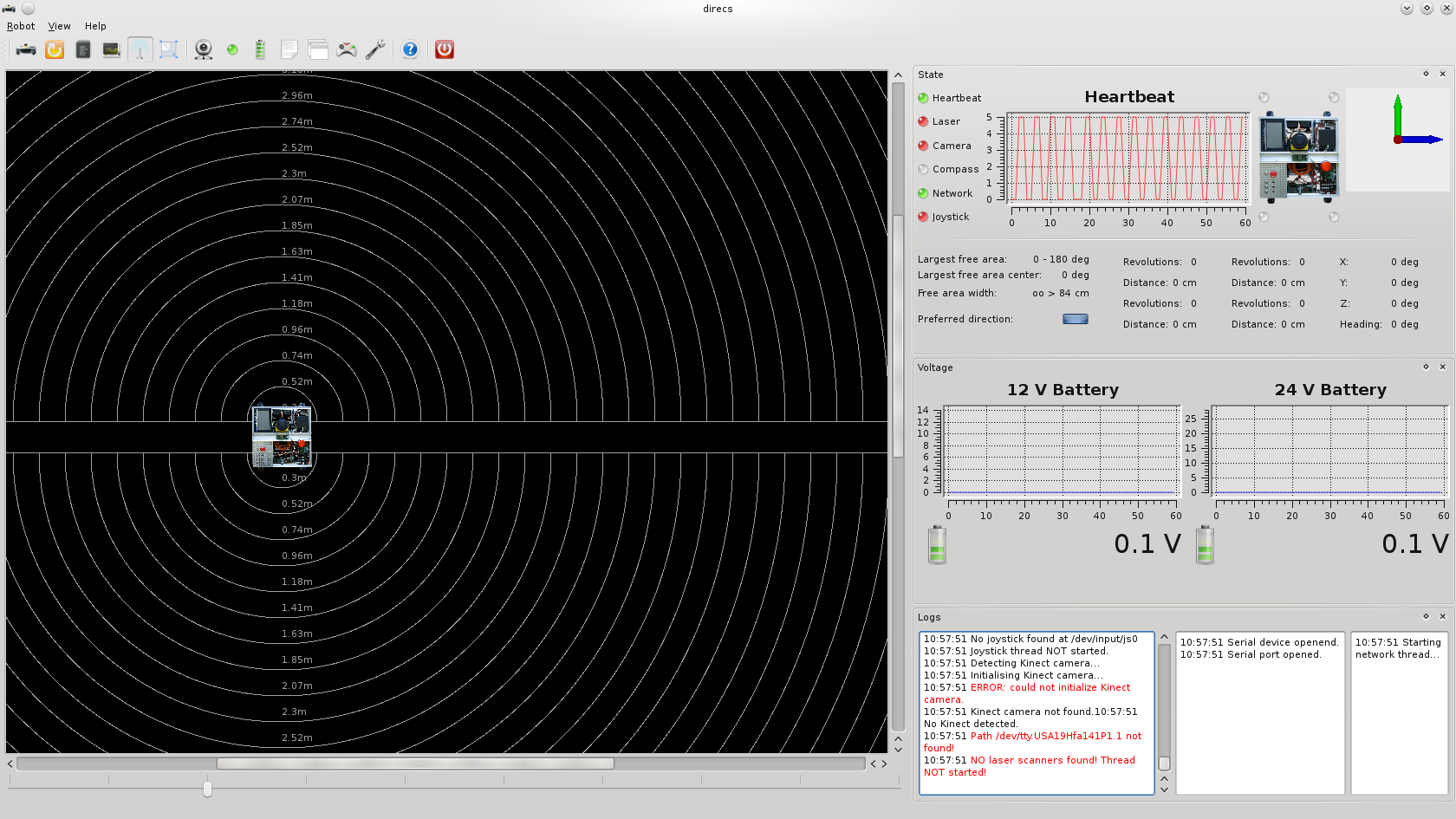
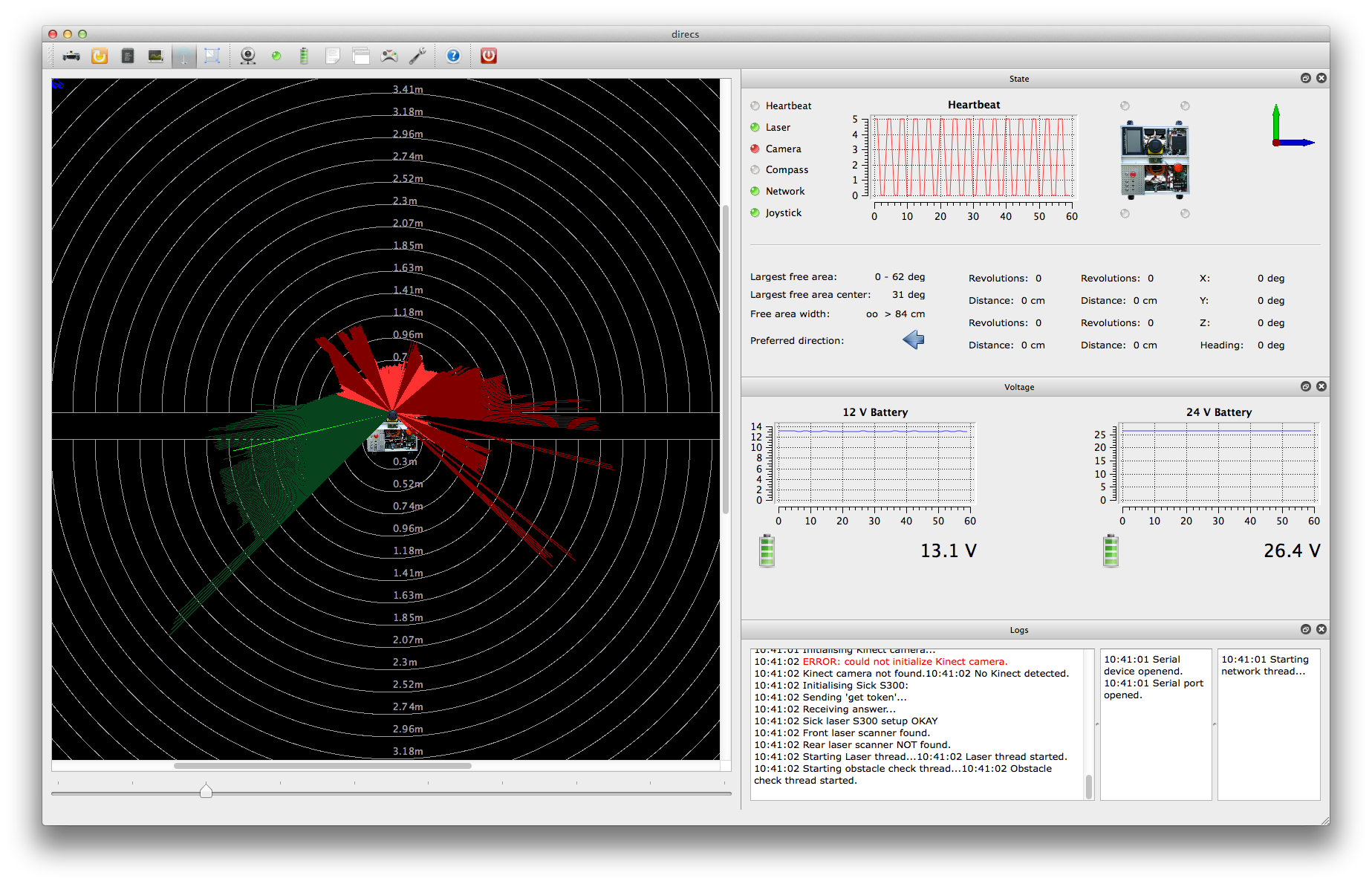
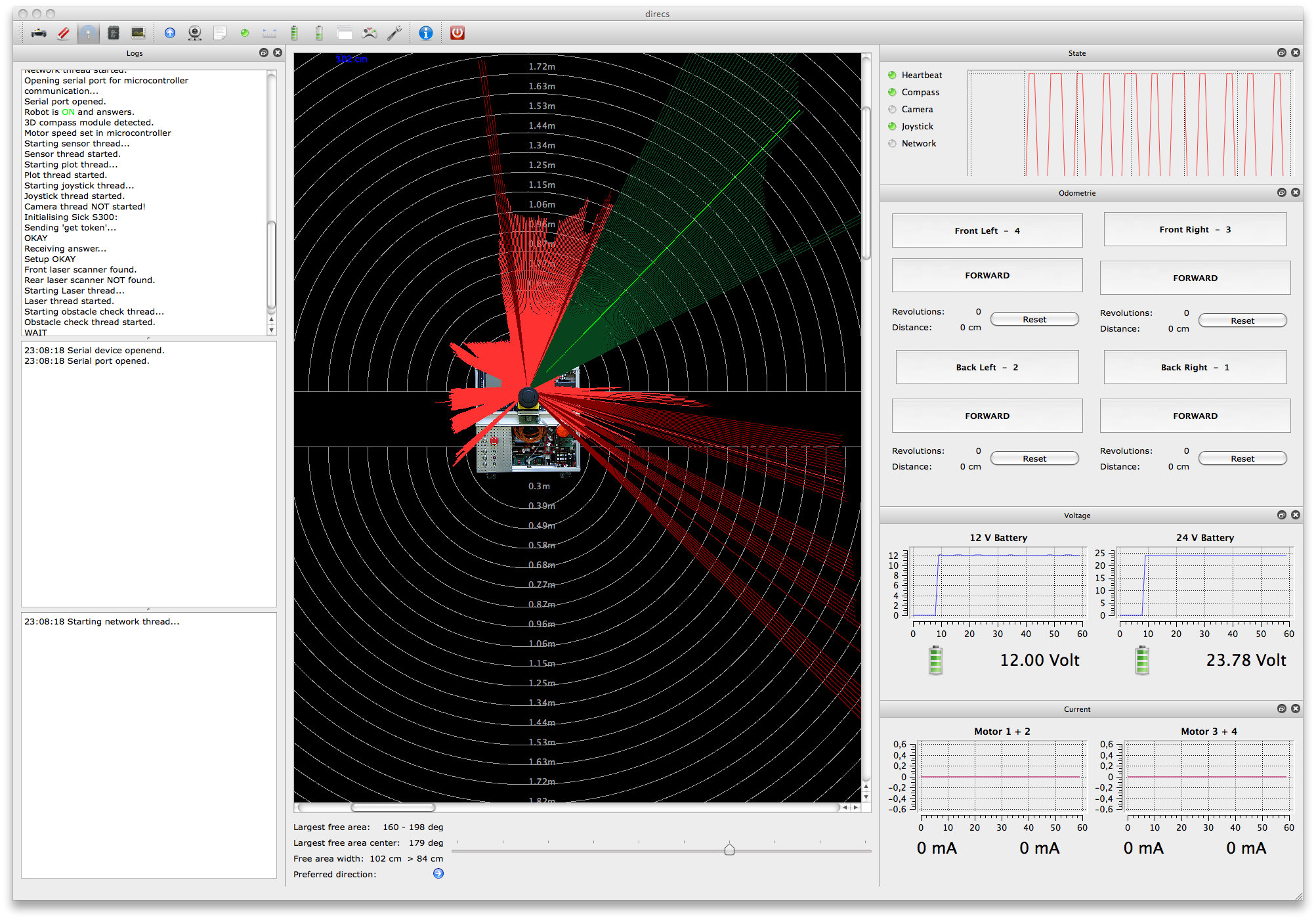
Interessanter Fehler, der bereits die ganze Zeit in der GUI angezeigt wurde: Unter zufälligen Umständen wurden "zufällige" Laserlinien in der GUI angezeigt (im Simulationsmodus. Zusätzlich wurde auch nur jede zweite Laserlinie dargestellt. So stellte sich dieses dar:

Nach längerem Debuggen stellte sich heraus, dass alle Laserlinienelemente in allen Schleifen vollständig vorhanden waren. Einzig in der Darstellung wurden sie nicht angezeigt… Ursache schien hier ein 32/64 Bit-Problem zu sein, denn beim Auslösen des Events des LaserThreads, dass alle Daten für die GUI zur Verfügung stehen, wurde ein Zeiger auf das erste Element einer QList übergeben. Da nur jeder zweite Wert angezeigt wurde macht deutlich, dass die Ablage der Werte im Speicher offensichtlich jeden zweiten "übersprungen" hat. Denn das jetzige System (ein Apple iMac) ist ein 64 Bit-System!
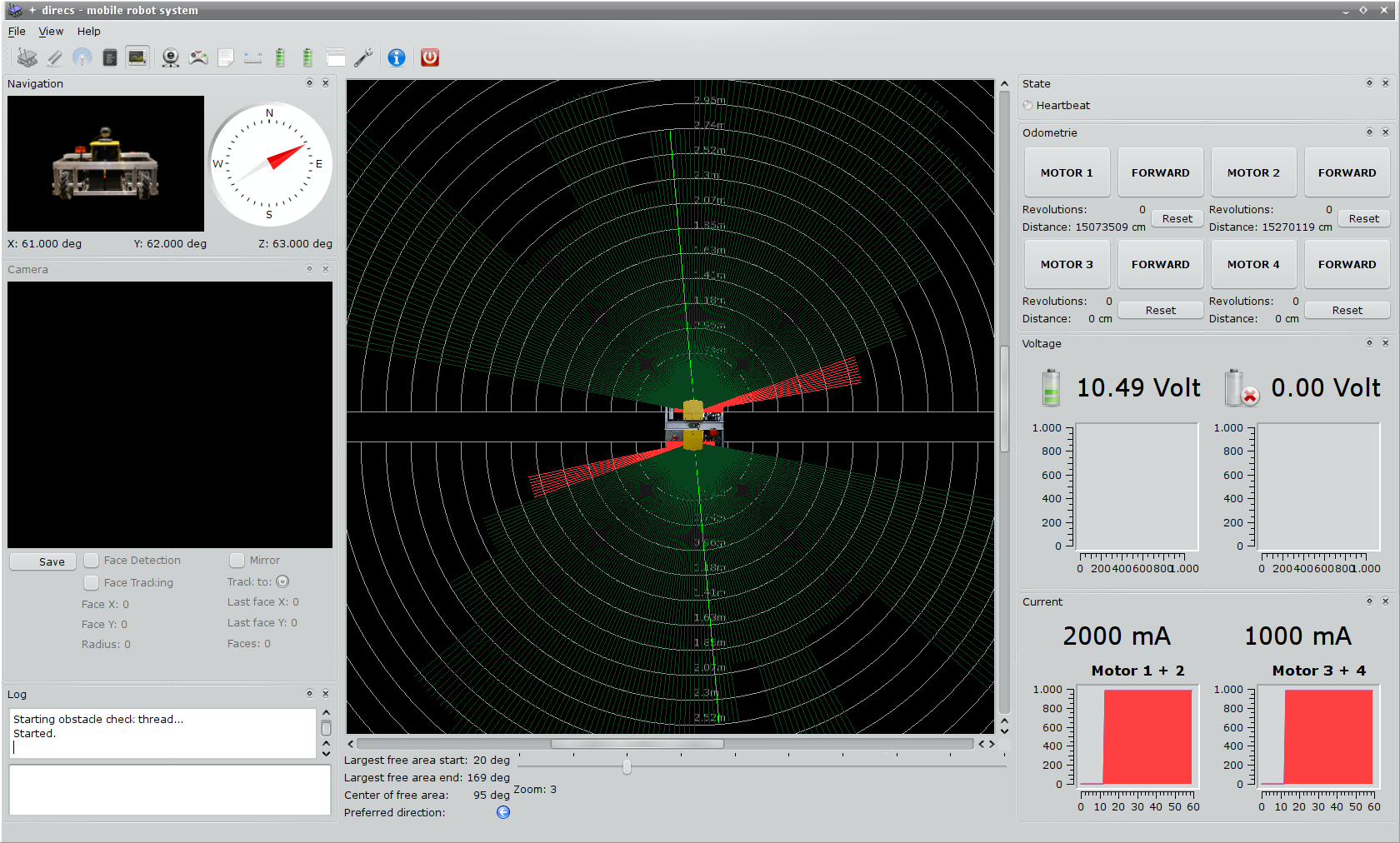
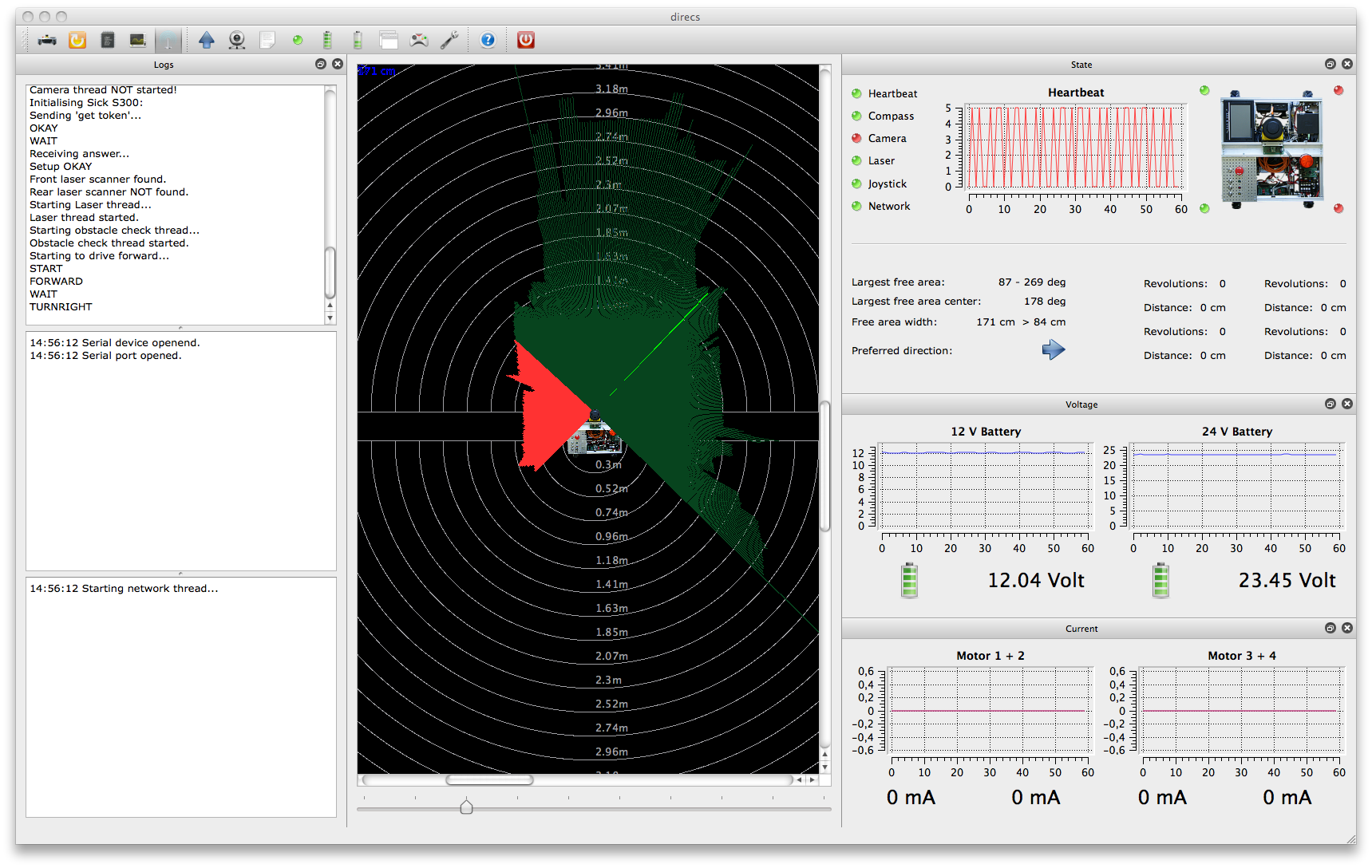
Da die QList ohnehin bereits 360 Elemente enthielt – unabhängig davon, wie viel Grad der Laserscanner abdeckt, wurde hier kurzerhand (Und um mehr Zeit für Wichtigeres im Projekt zu verwenden) einfach auf ein normales good-old float-Array umgestellt. Nun werden alle Werte korrekt an die GUI emmited und damit auch wieder dargestellt.