Ein Video des RoboCup@Home 2011; der Roboter des Team ToBI:
Der Roboter ist von der Universität Bielefeld.
PS.: Das Intro ist noch falsch im Video betitelt, sorry. Wird vielleicht mal korrigiert.
Ein Video des RoboCup@Home 2011; der Roboter des Team ToBI:
Der Roboter ist von der Universität Bielefeld.
PS.: Das Intro ist noch falsch im Video betitelt, sorry. Wird vielleicht mal korrigiert.
Wie auch in der aktuellen Ausgabe meines Robotik-Podcasts Robotiklabor berichtet, gibt es mit dem derzeitigen Atmel-Board ja immer Probleme mit der Kommunikation über die serielle Schnittstelle, genauer, dem USB-Port. Um hier auch einmal neue Wege zu gehen, wurde mir das STM32F4 Board von STMicroelectronics empfohlen.
Bestellt wurde es vorgestern bei Watterott für schlappe 16,66 EUR zzgl. Versand – kaum vergleichbar mit dem derzeitigen Atmel 2560-Board, welches ca. 60 EUR kostete. Nach etwas Ärger mit DHL erreichte mich das Board glücklicherweise dann doch bereits heute, so dass ich hier schon einmal ein erstes Video zeigen möchte:
Hier noch ein Auszug der STMicroelectronics-Seite mit den Hauptmerkmalen des Boards:
Und noch ein paar Fotos:




Um das Thema Robotik für eine breitere Masse interessanter zu machen, habe ich mich entschlossen, parallel einen deutschen Podcast über Robotik und alles was dazu gehört zu starten. Hier findet ihr weitere Informationen:
Viel Spaß beim Reinhören!
Wie sicherlich an den hunderten von Bildern und zig Videos erkennbar ist, ist in die Robotikprojekte hier seit 2005 nicht nur viel Zeit, sondern mittlerweile auch viel Geld gesteckt worden. Das ist auch okay so. Jeder der schon einmal mit vergleichbaren Projekten zu tun hatte, wird das verstehen…
Natürlich sind meine Mittel auch nur begrenzt. Und alle Kosten für diese Webseite, für alle Materialen, Messgeräte, Videokameras und sonstige Gadgets wurden von mir vollständig privat finanziert. Und glaubt mir, hätte ich es vorher gewusst… Na, man kann nie wissen. Aber vielleicht ist es auch gut so, dass man das vorher nie weiß. :-)
Um es kurz zu machen: Jeder, der dieses Projekt weiter unterstützen möchte und dazu beitragen will, dass es direcs noch lange weiter gibt, kann dieses gerne via Flattr tun. Bitte nutzt dazu die entsprechenden flattr-Buttons..
Und wenn ihr euch schon immer gefragt habt, wer eigentlich hinter direcs steckt, hier gibt es die Antwort.
Um das direcs Hauptprogramm auf dem Roboter optimal nutzen zu können, wurde für den Roboter die GUI neu designt. Der Clou dabei: Wenn das Programm auf einem Gerät gestartet wird, welches im Hostnamen "robot" enthält, wird automatisch die "kleine" neue GUI verwendet. Klein deshalb, weil sie für die Auflösung des Touchscreens auf dem Roboter optimiert wurde (840×542 Pixel). Bisher wurde die GUI beim compile-Vorgang fest ausgewählt. Ferner kann die kleine GUI auf jedem anderen System erzwungen werden, wenn als Startparameter "small" übergeben wird (die große mit "large"). Verzichtet wurde in der kleinen GUI auf keines der bisherigen Elemente, sie wurde nur anders angeordnet – konkret wurde sie auf mehrere Tabs / Reiter verteilt. Und sieht das Ergebnis aus (nur einige Tabs dargestellt):
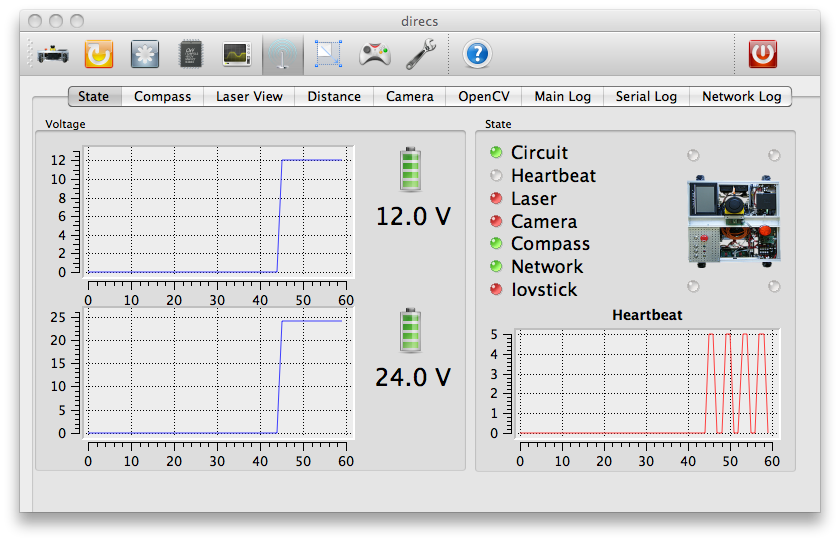
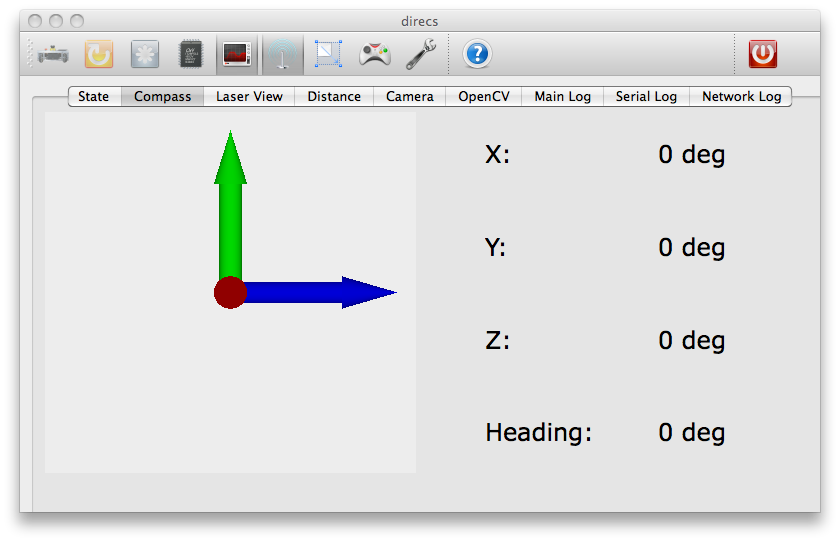
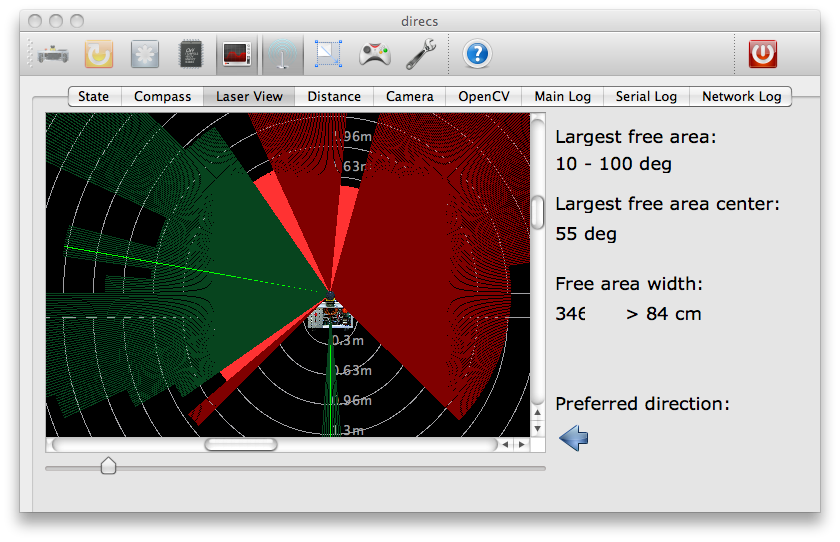
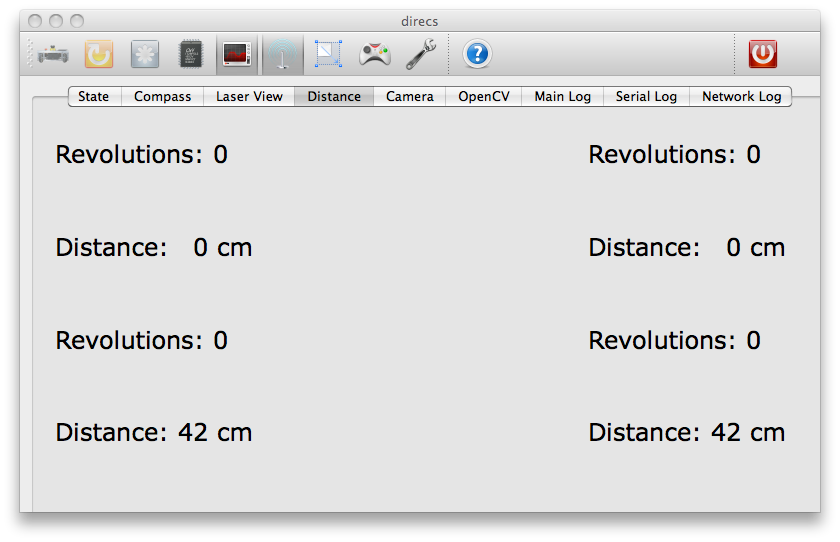
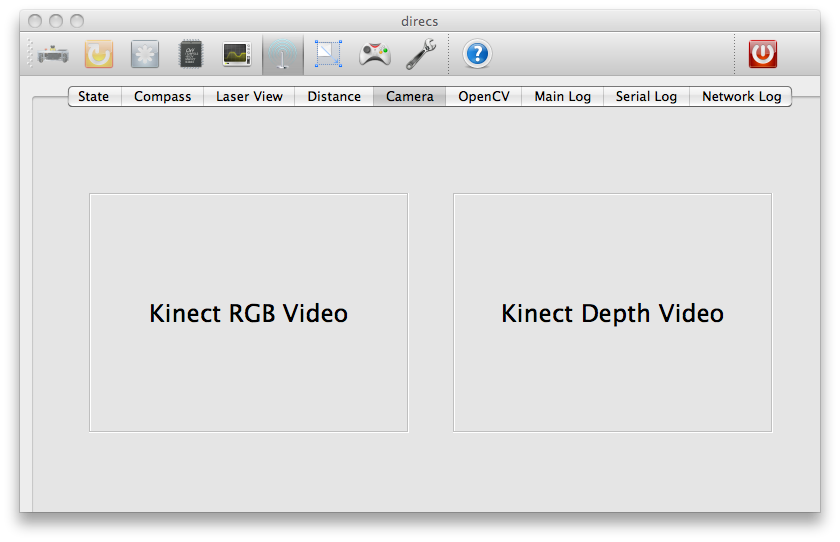
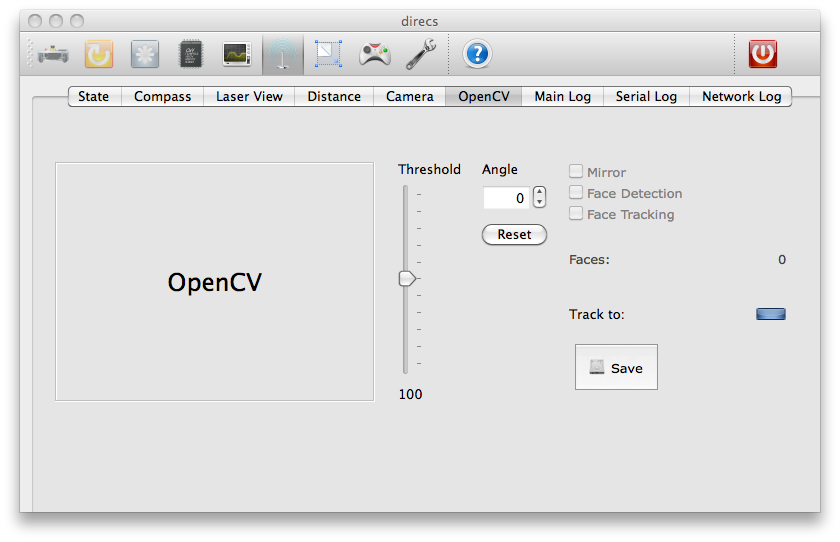
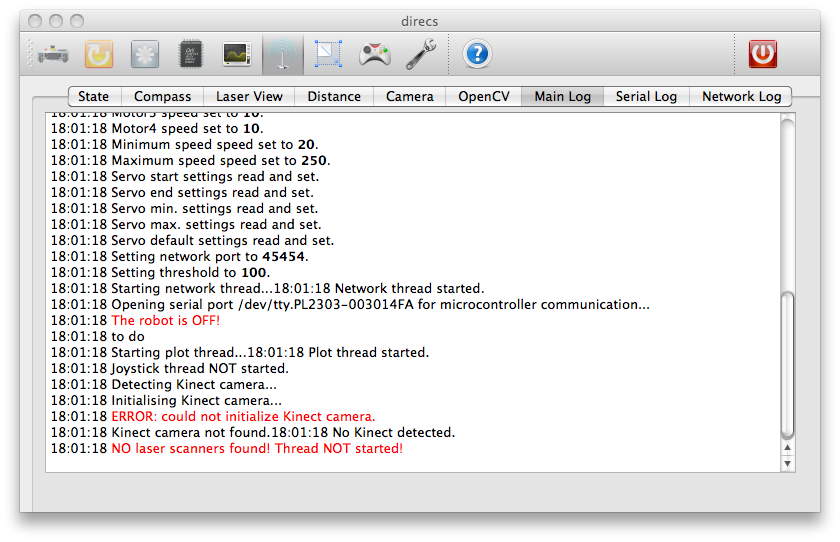
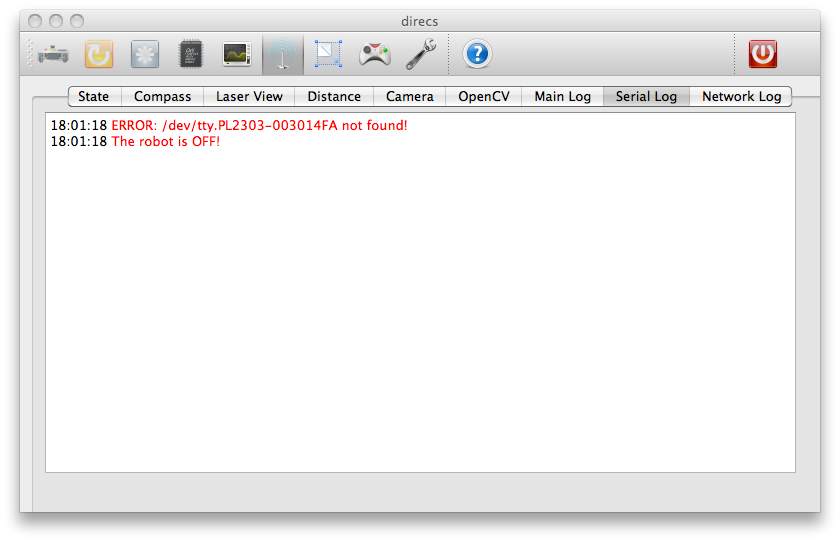
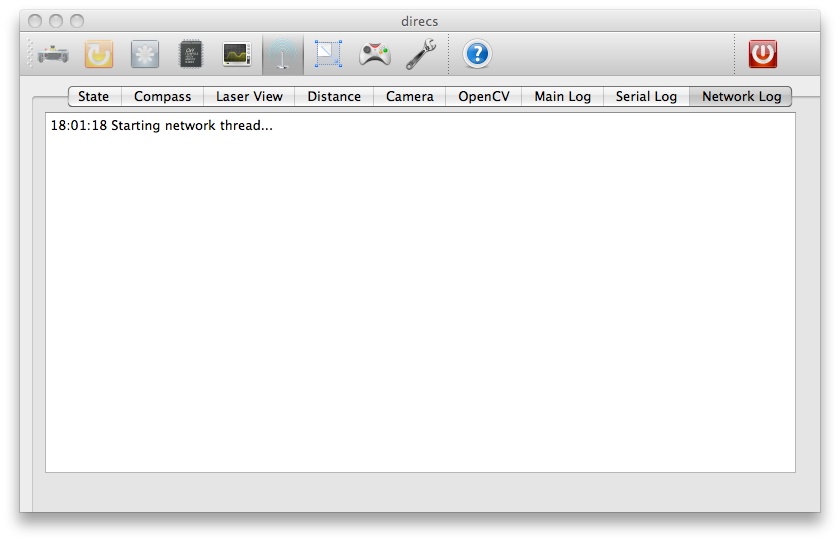
PS.: Die Kinect-Kamera und der Roboter warten zum Zeitpunkt der Screenshots nicht angeschlossen und nur der Simulationsmodus aktiviert.
Hier nun das letzte Video des RoboCup@Home 2011 Finales. Es ist das Team NimbRo der Universität Bonn. Mit einer absolut beeindruckenden Leistung überzeugten sie auch die Jury und landeten darum als Ergebnis auch auf Platz 1.
Aber seht selbst:
Ein weiteres Video des RoboCup@Home 2011. Hier die SmartBots@Ulm der Hochschule Ulm:
Ein weiteres Video des RoboCup@Home 2011. Hier das Team ToBI der Uni Bielefeld:
Leider ist hier „nur“ der Vortrag zu dem Roboter zu sehen, da es Probleme mit der Kamera gab. Sorry.
Aber es gibt ja noch weitere Videos anderer Teams – einschließlich des Gewinners des RoboCup@Home 2011.
Ein Video der RoboCup 2011 Standard Platform League; es spielen die Roboter der Teams HTWK und RoboEireann:
Der Roboter in der Standard Plattform Liga heißen Nao und sind vom Herstellers Aldebaran Robotics.