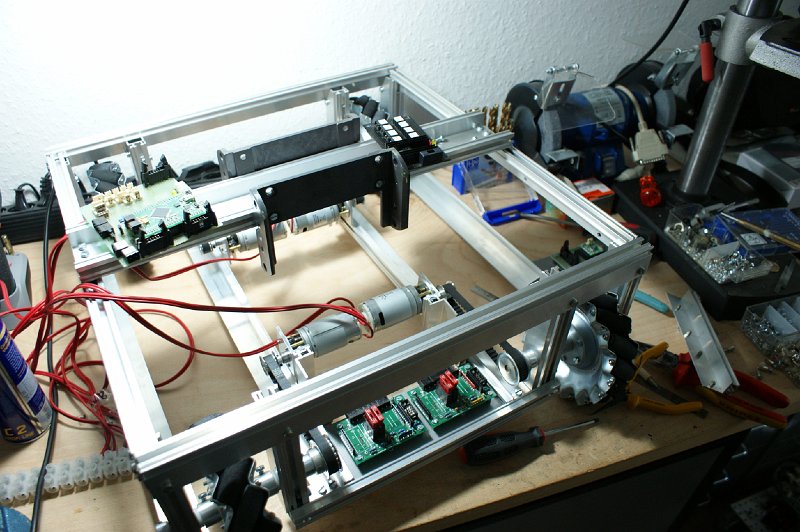
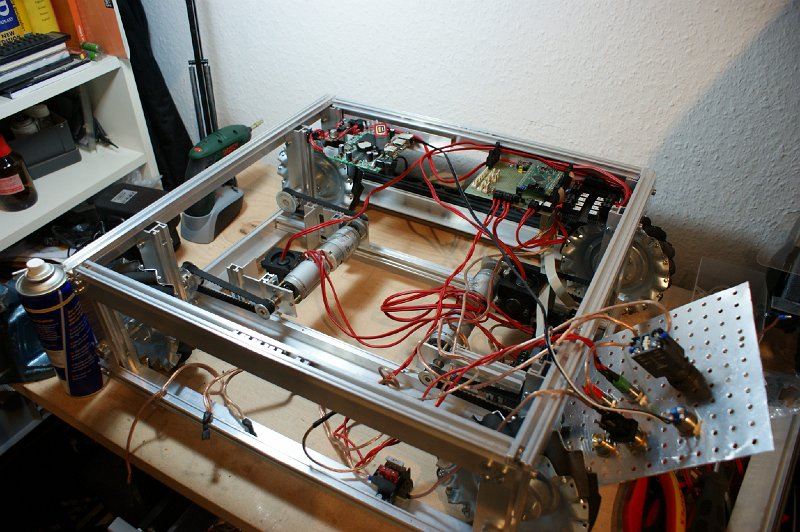
Nach der NSLU war jetzt die Verkabelung der Laserscanner an der Reihe.
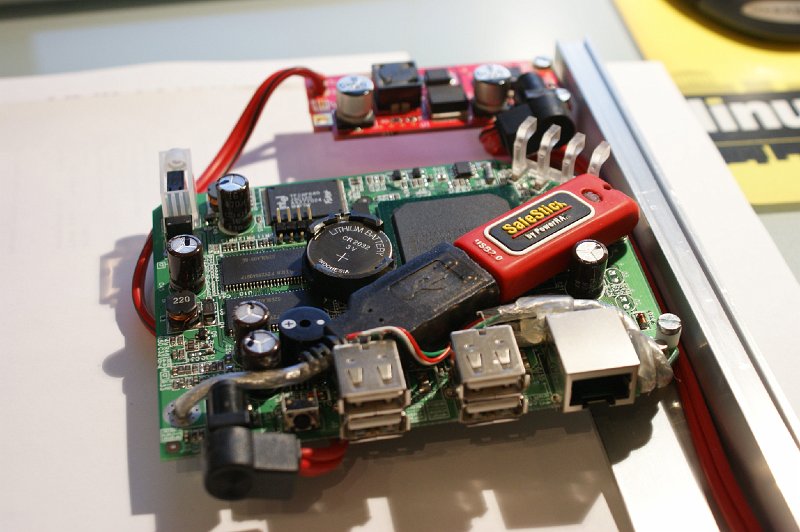
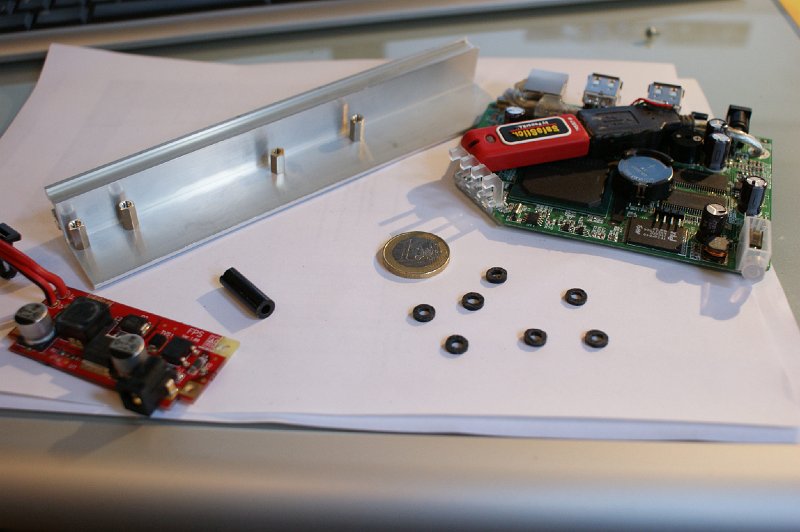
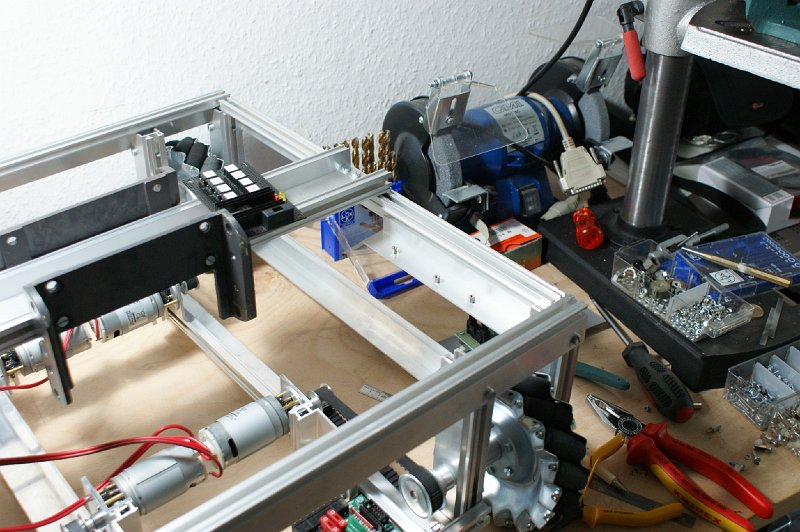
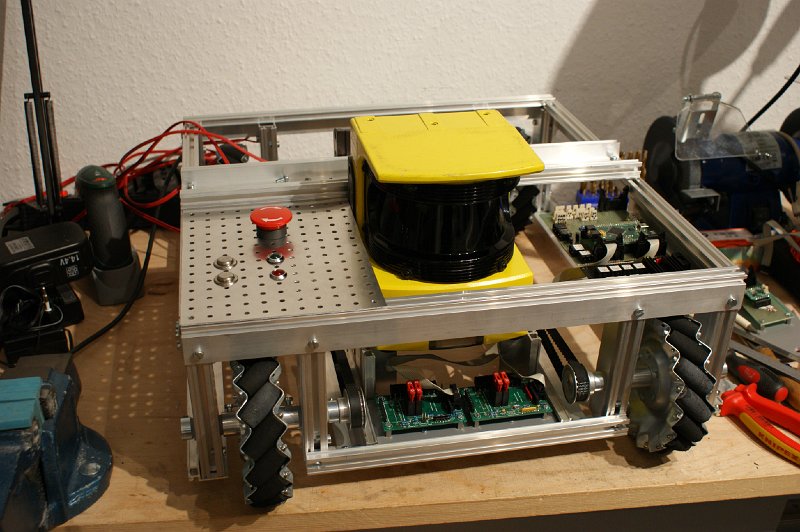
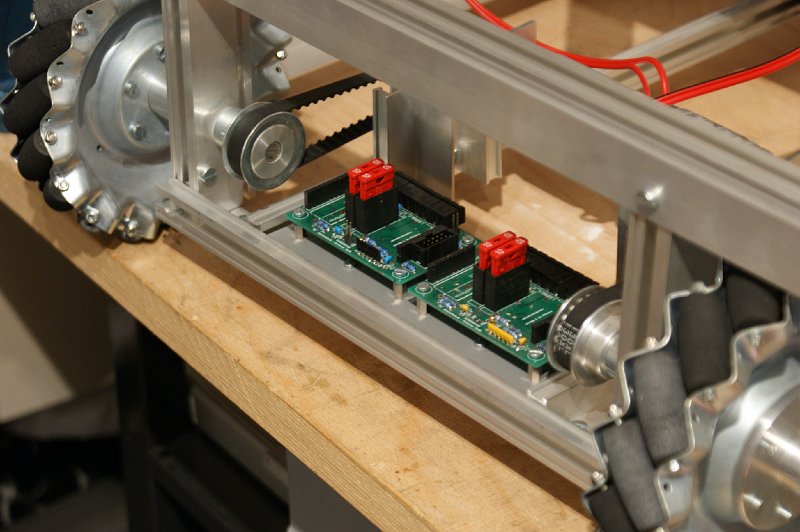
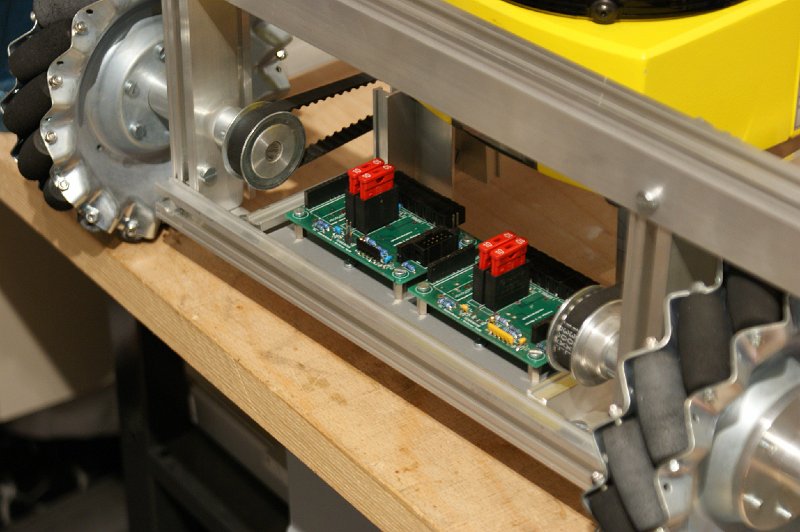
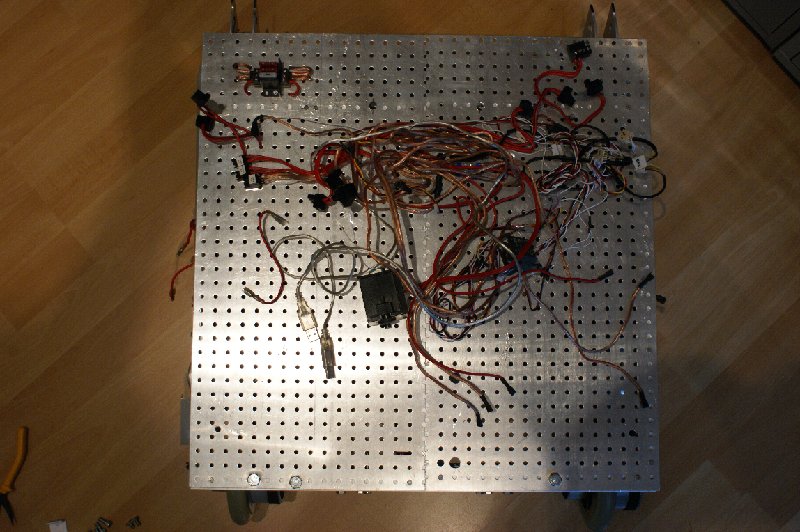
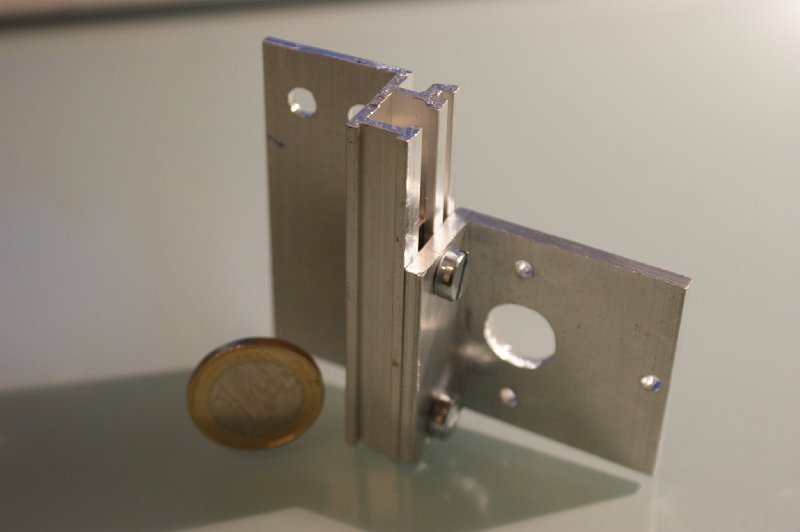
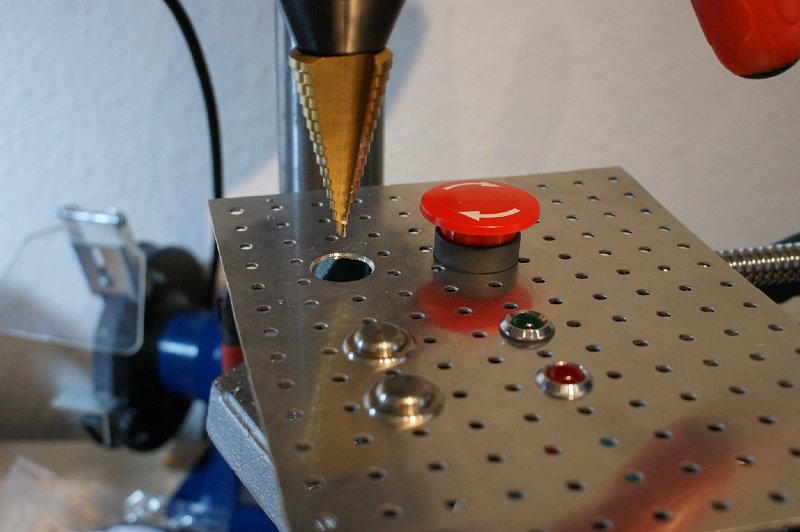
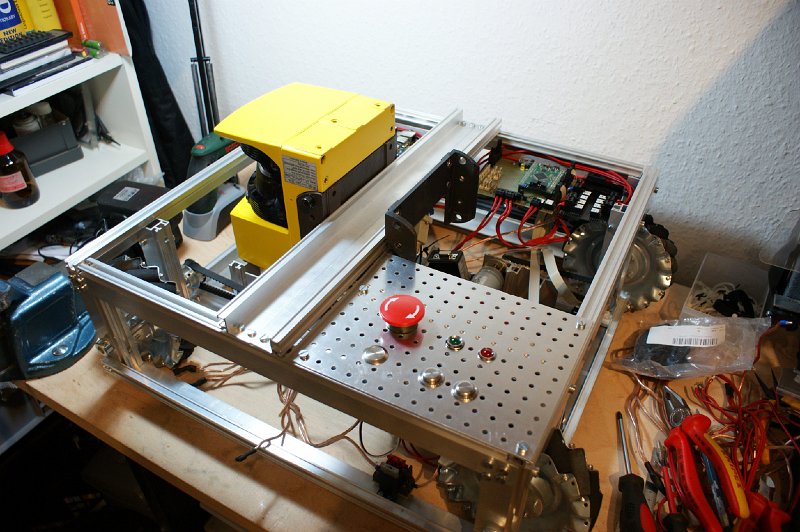
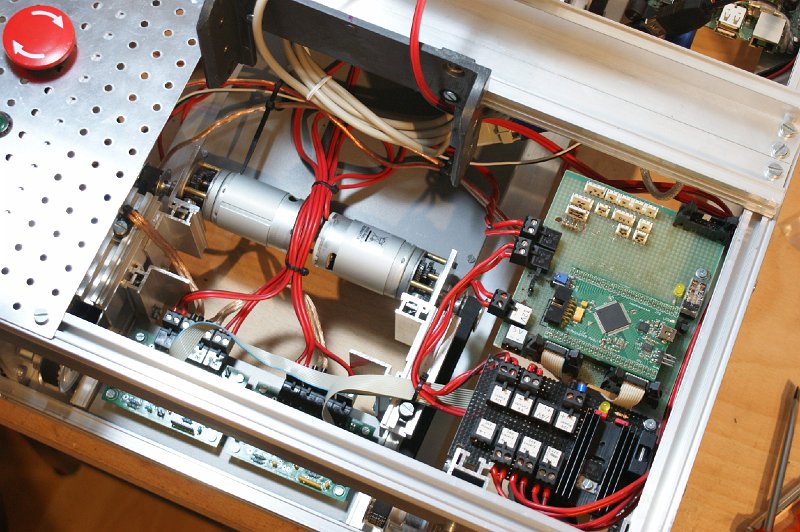
Vorher bekam die NSLU2 noch einen Ein-Aus-Taste spendiert (hier zu sehen die Lochbohrung in der Konsole) und die Motorboards wurden mit 12V versorgt:
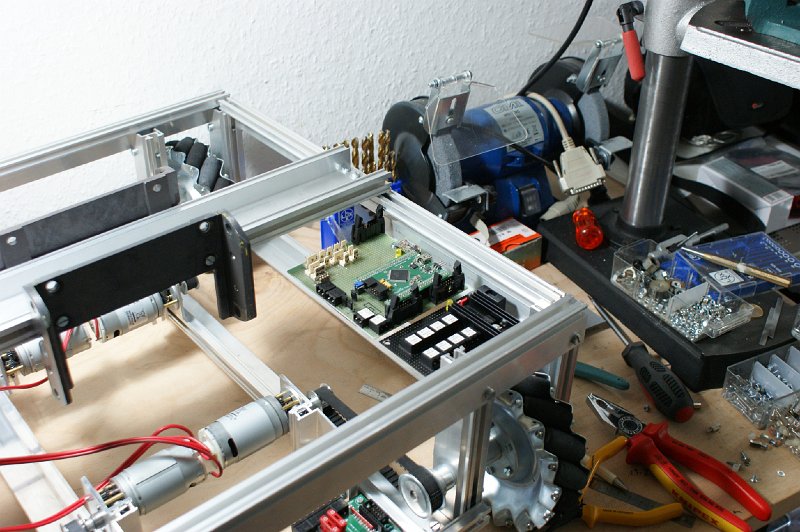
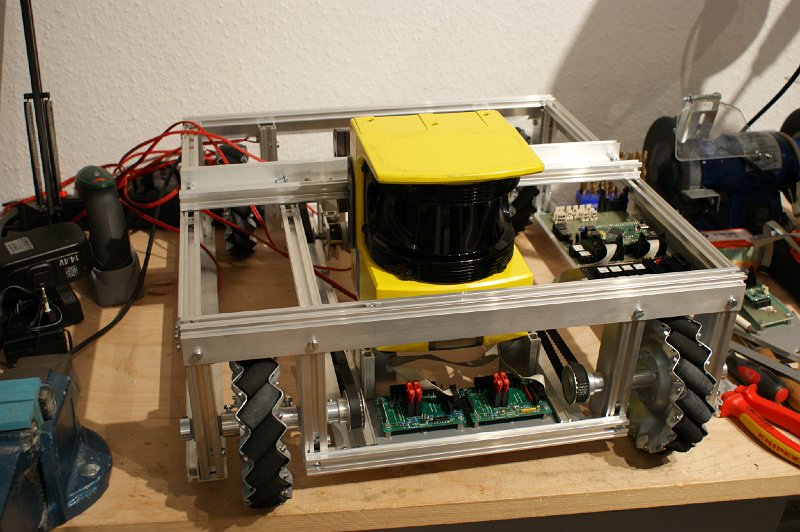
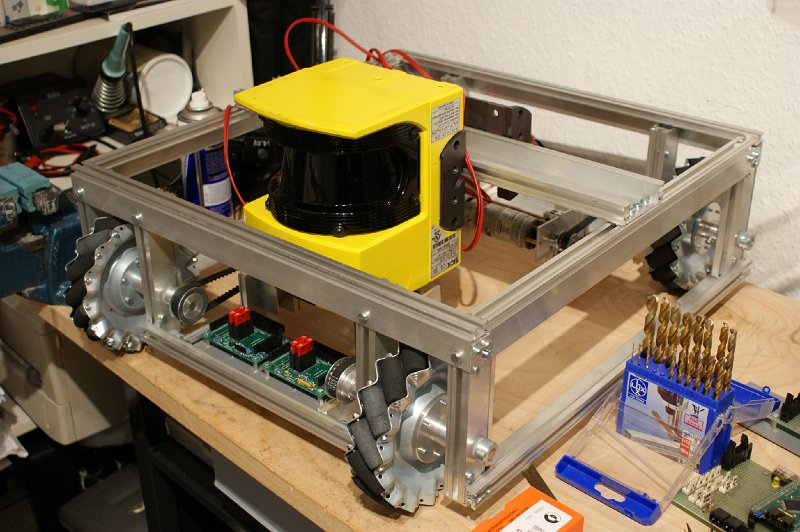
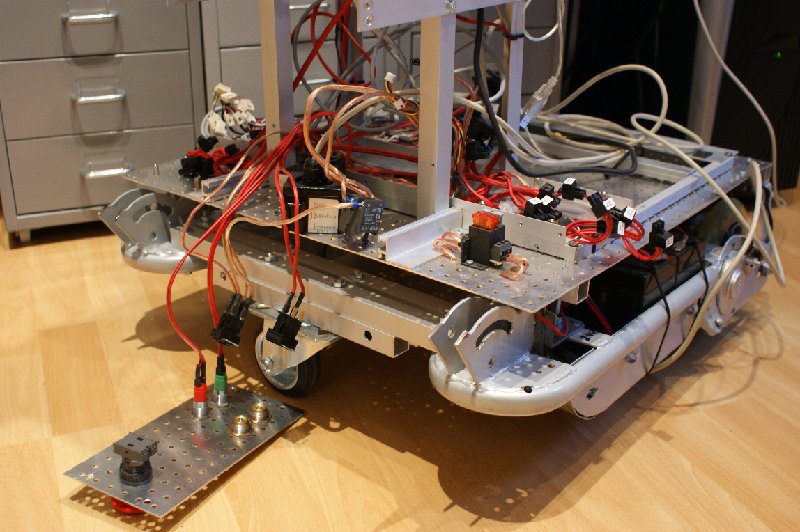
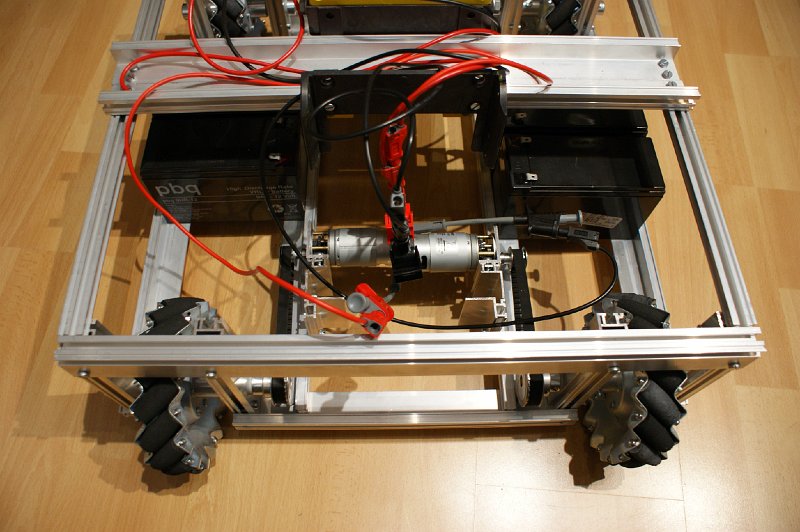
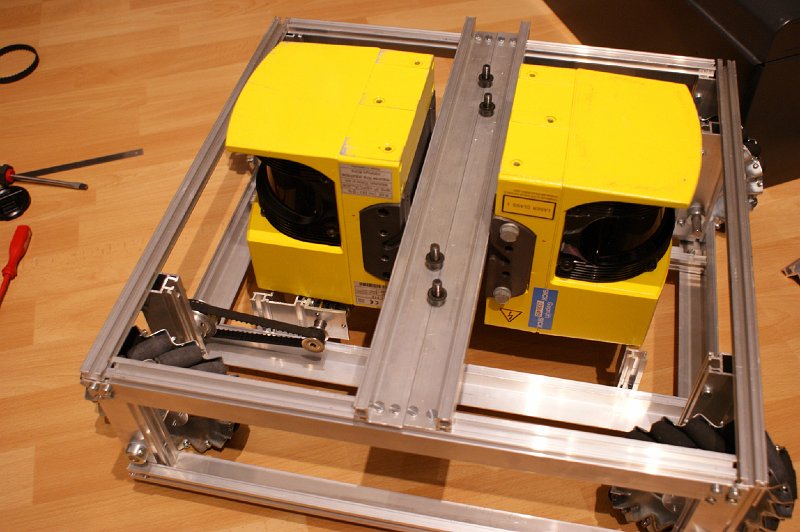
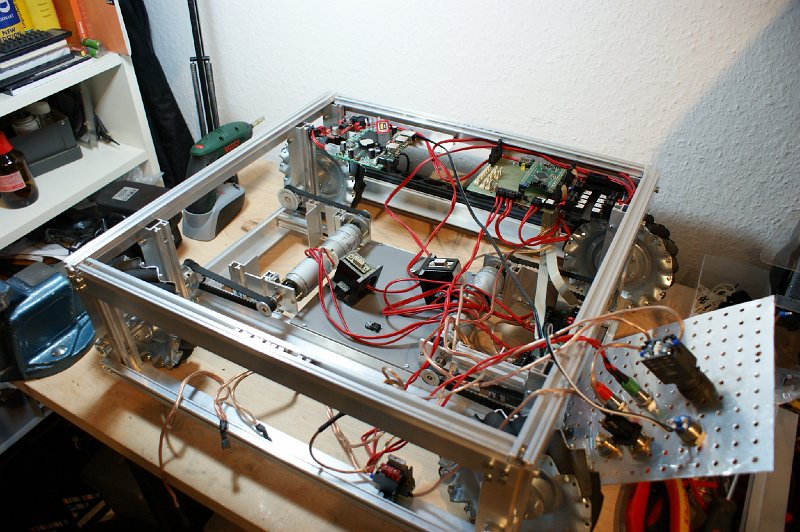
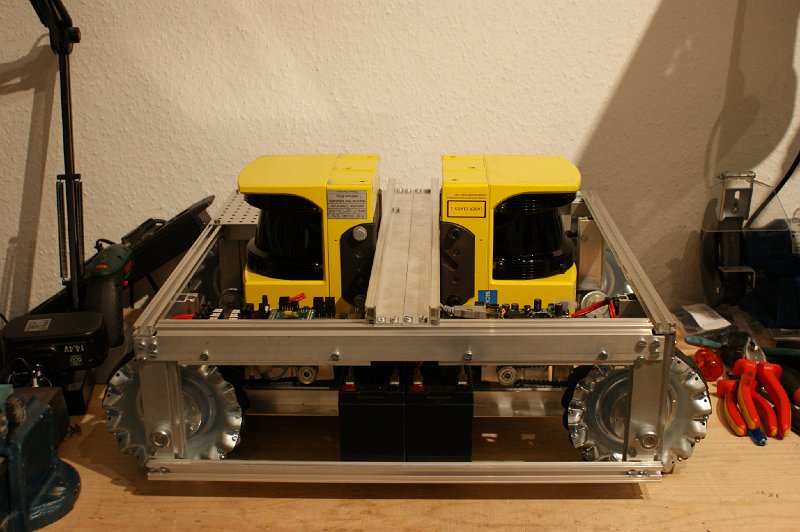
Nun aber die Verkabelung der Laser (inklusiver Sicherungen):
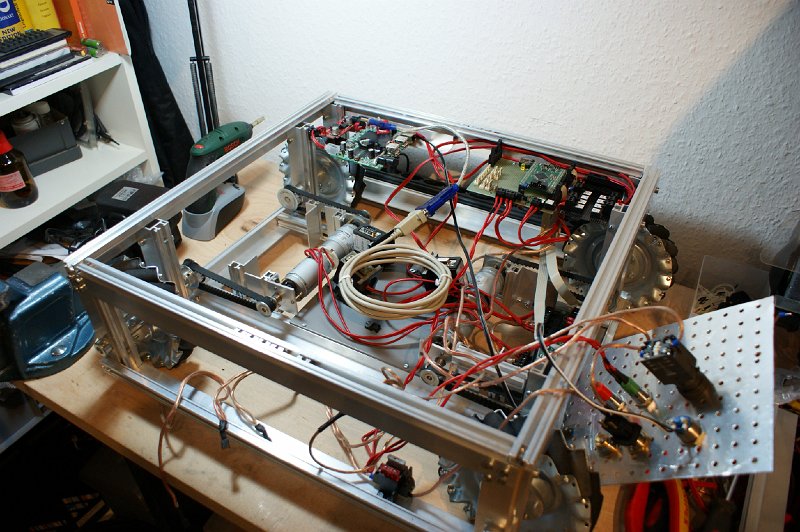
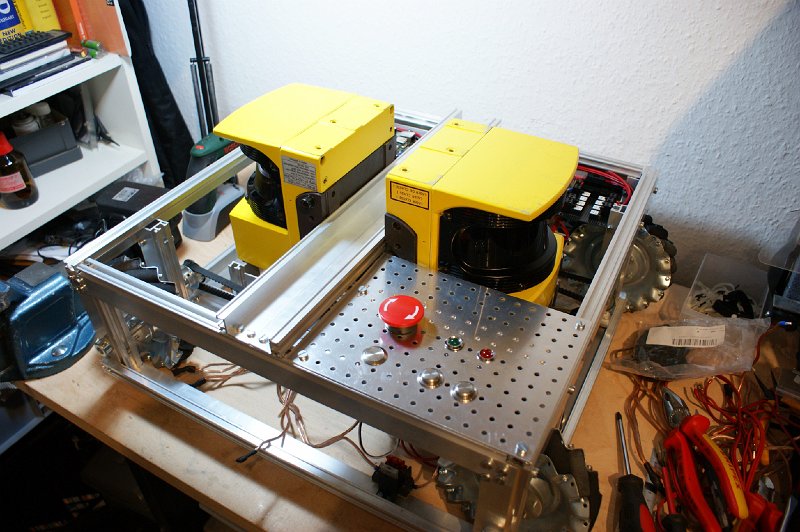
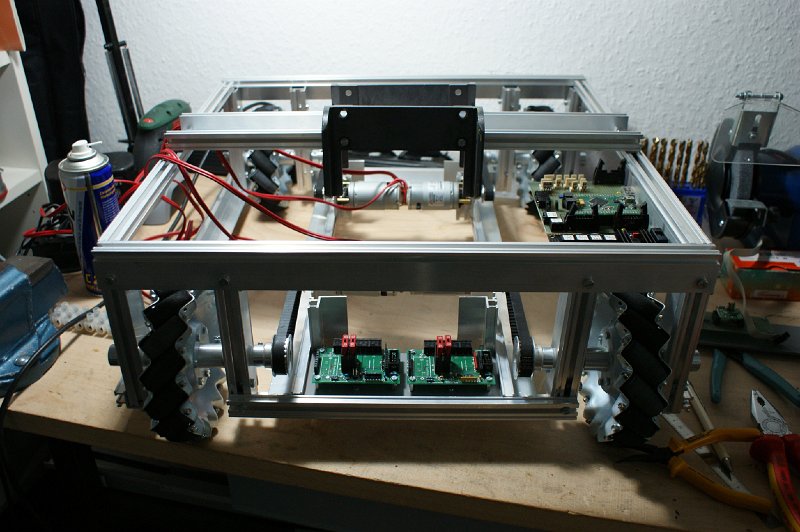
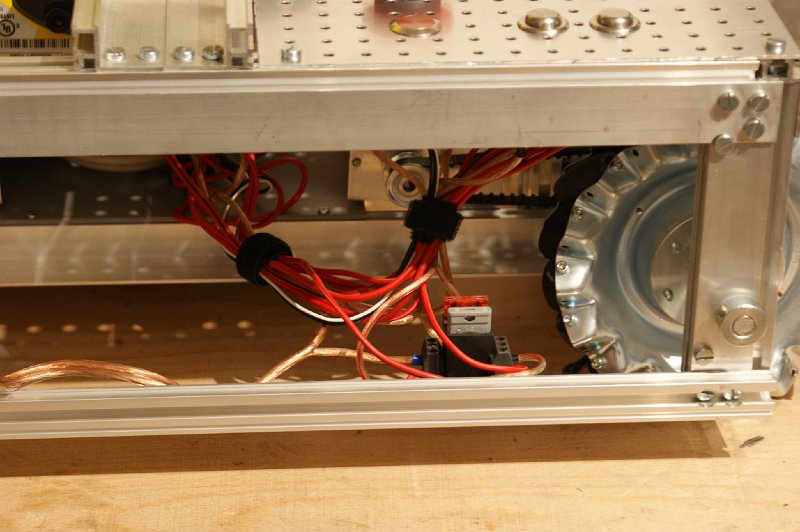
Unterhalb der Laserscanner wurden die Kabel einigermaßen gebündelt, damit nichts "lose rumfliegt":
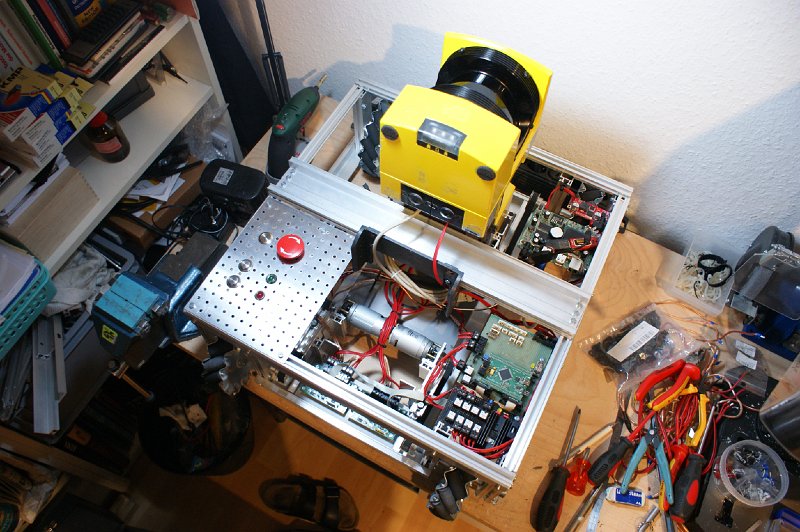
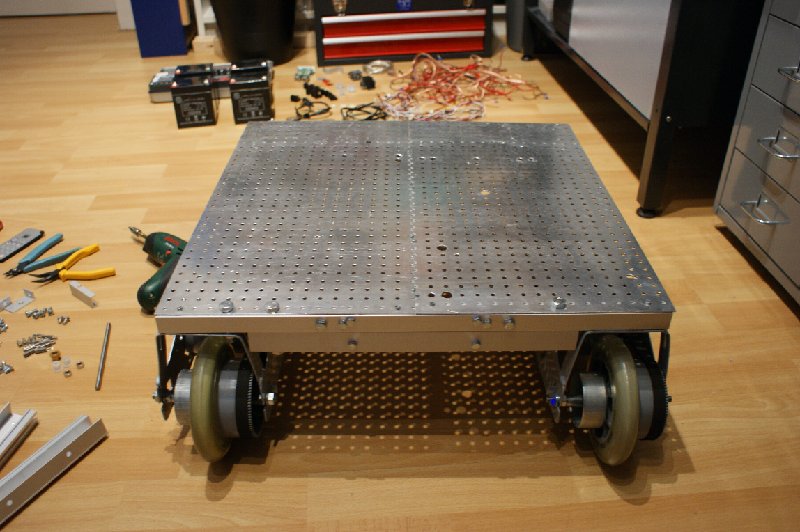
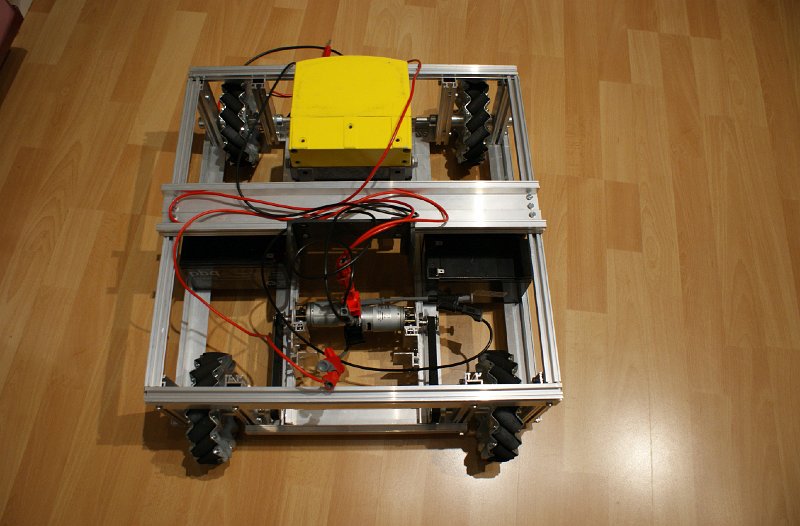
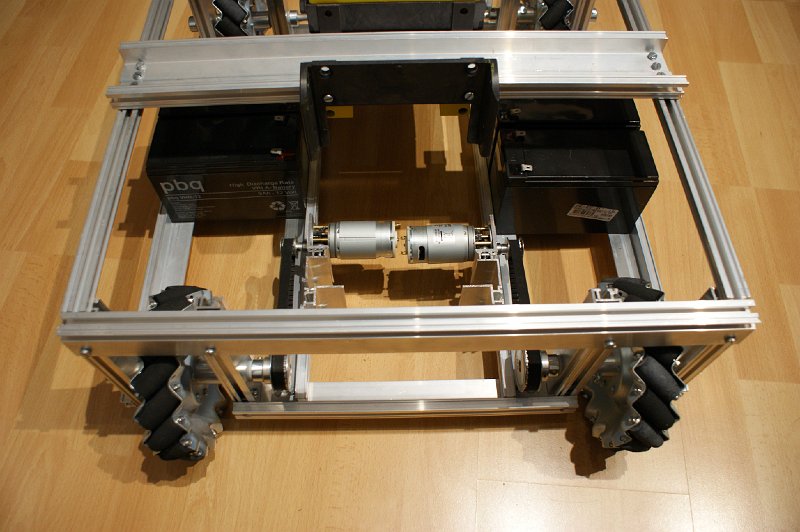
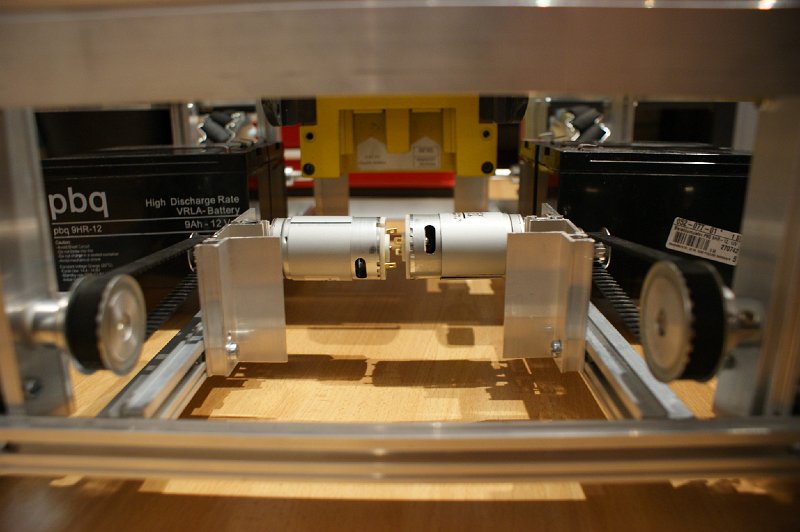
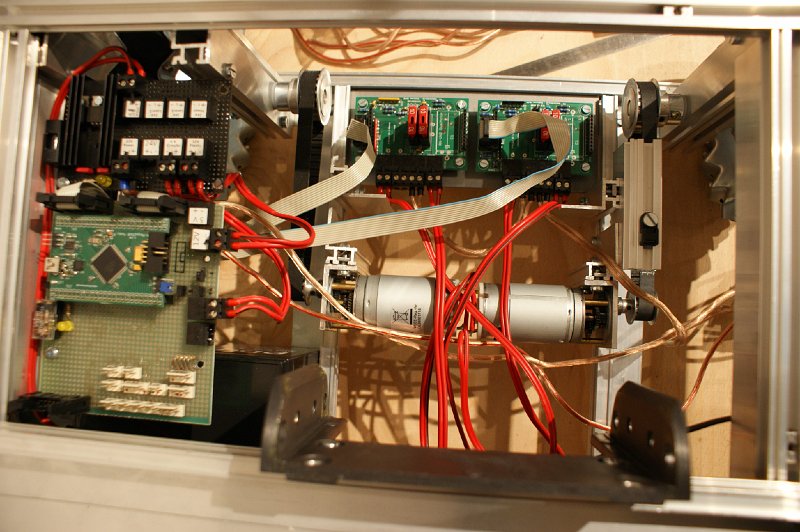
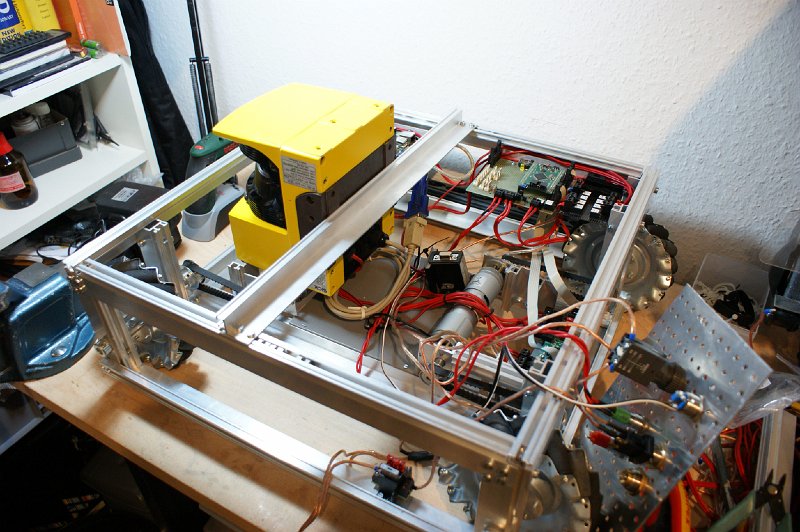
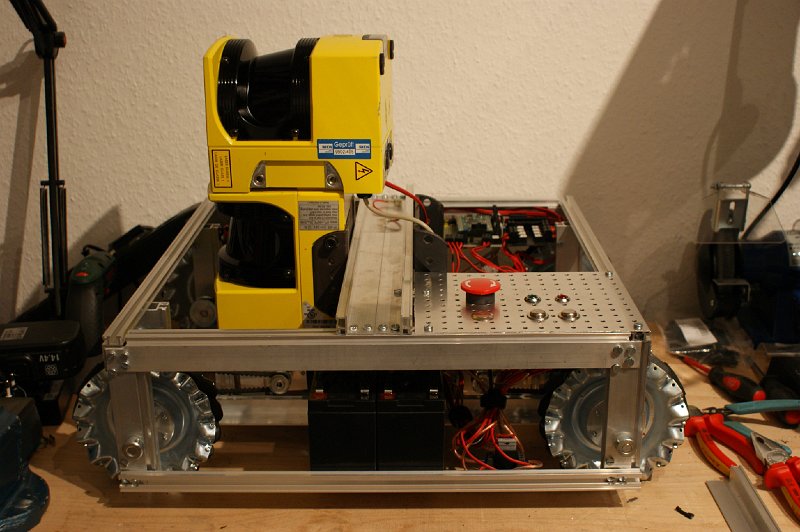
Auch die Akkus können jetzt auch an ihren vorgesehenen Platz. Erst auf der rechten Seite…


…dann auf der linken:
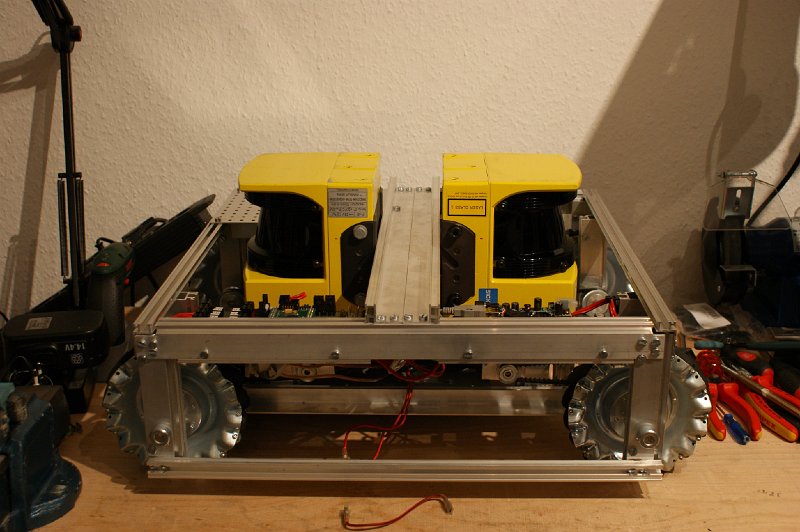
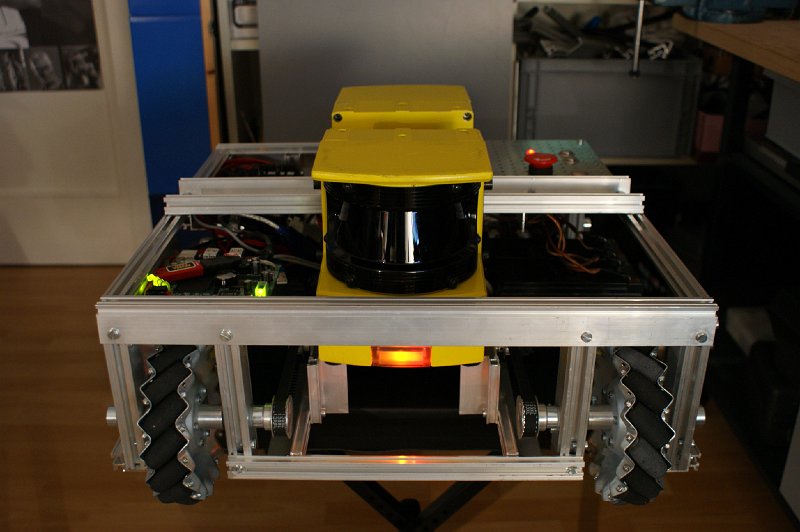
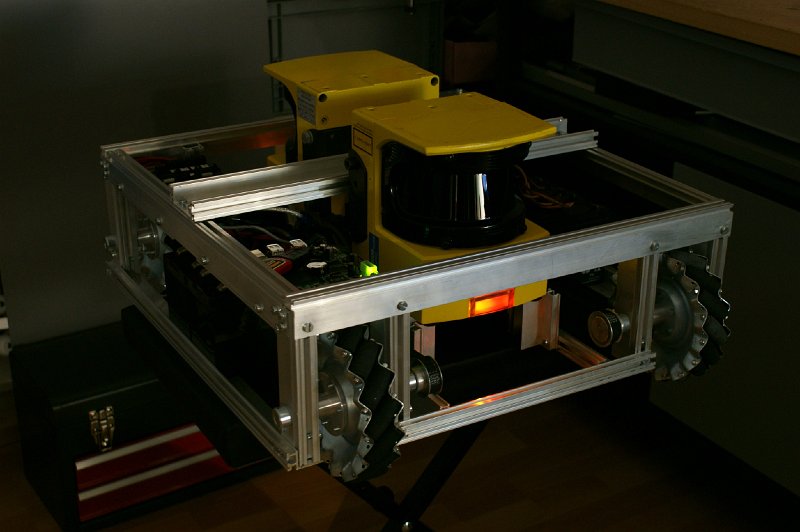
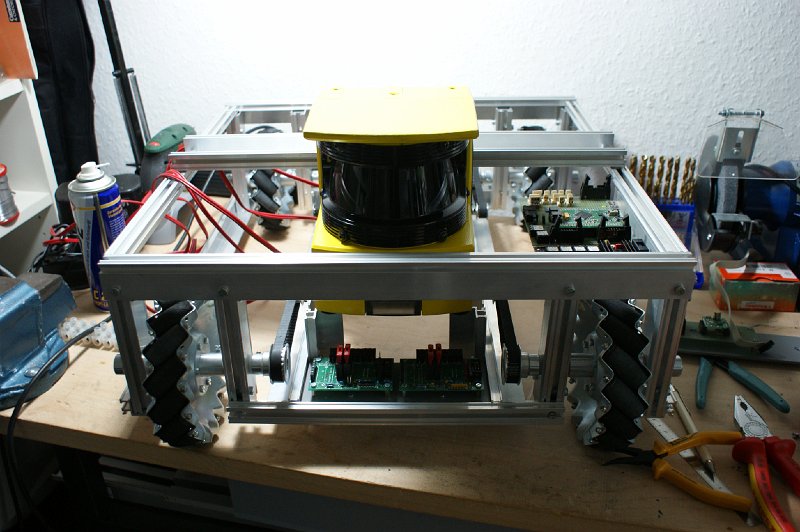
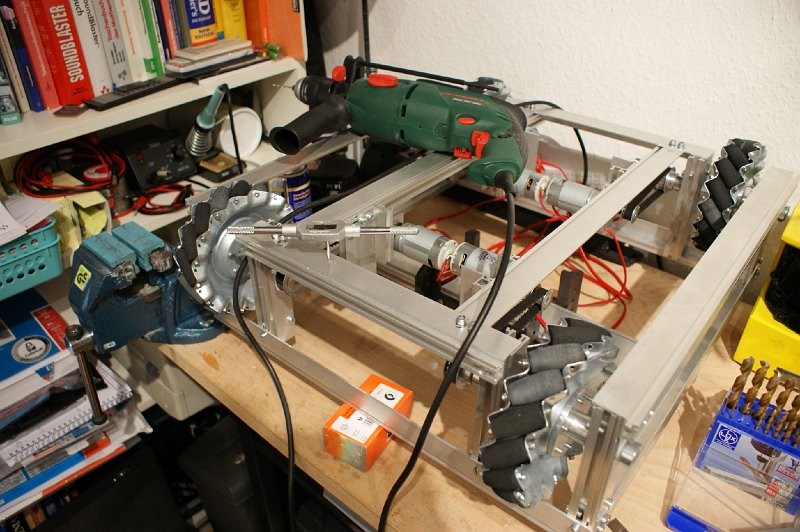
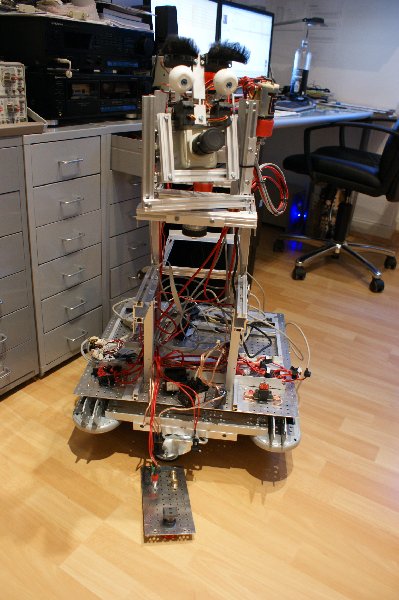
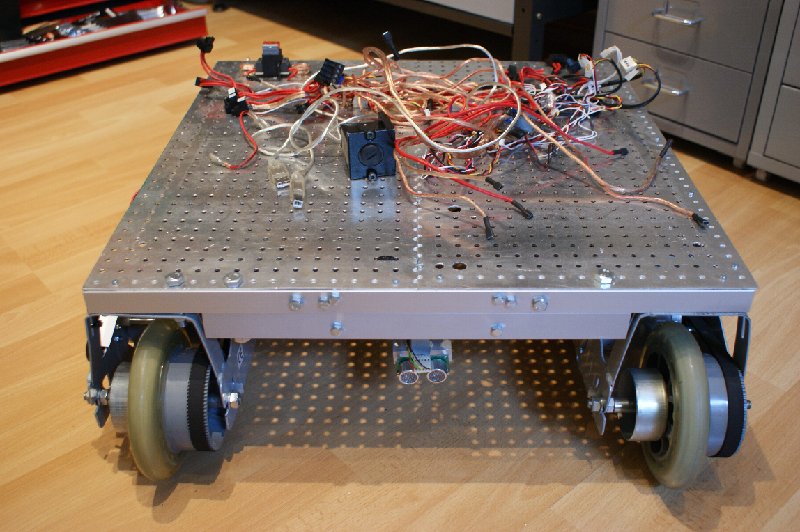
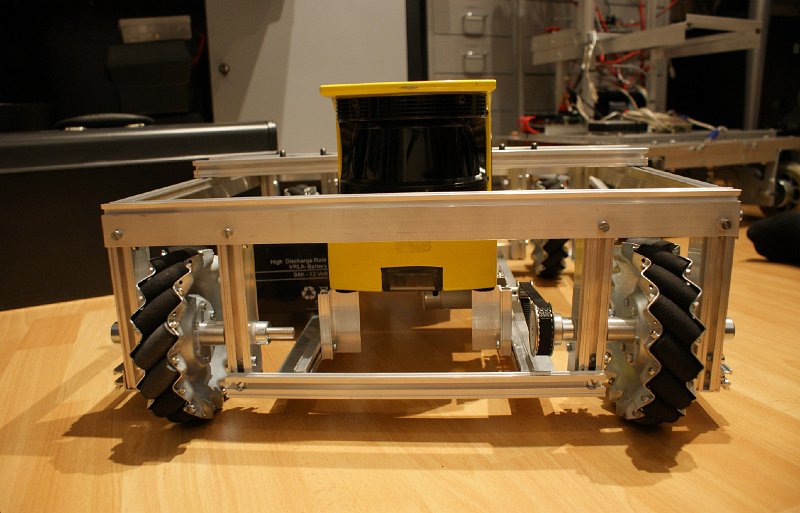
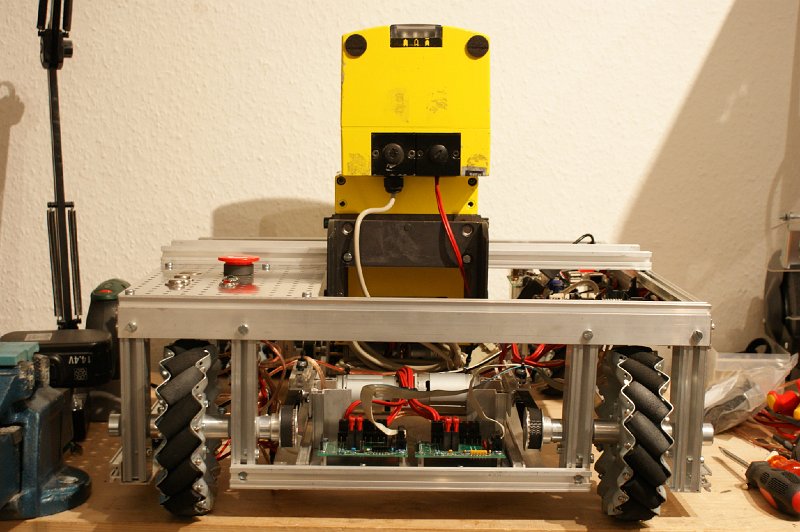
Und zum Schluss ein wenig "Showtime":