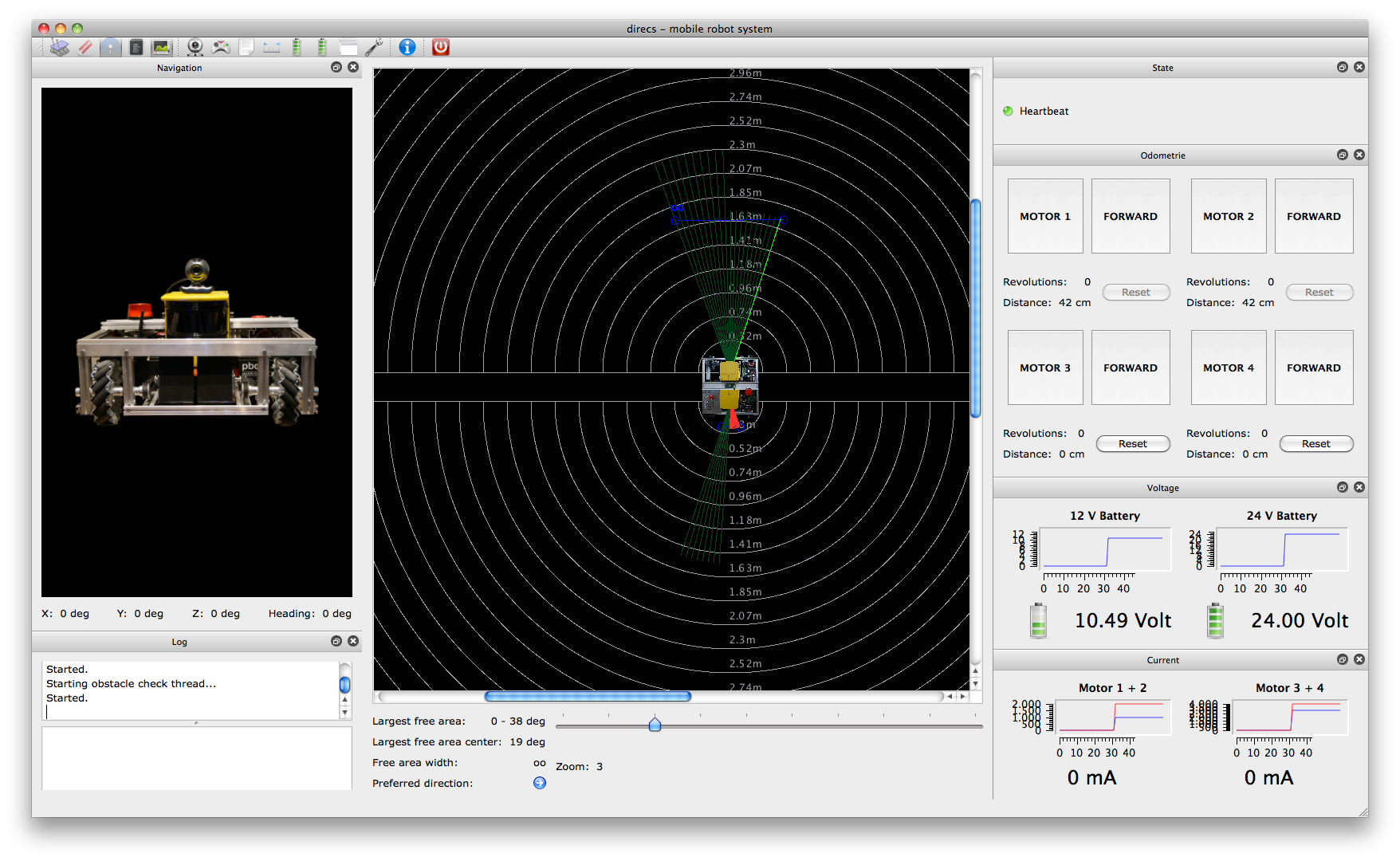
Nachdem ich mich entscheiden habe, statt meines good-old Linux-PCs zu einem Apple iMac zu wechseln, stand auch die Portierung zu Mac OS an. Stand deshalb, weil die ersten Schritte mitterweile erledigt sind. Und so sieht das Ganze dann aus:
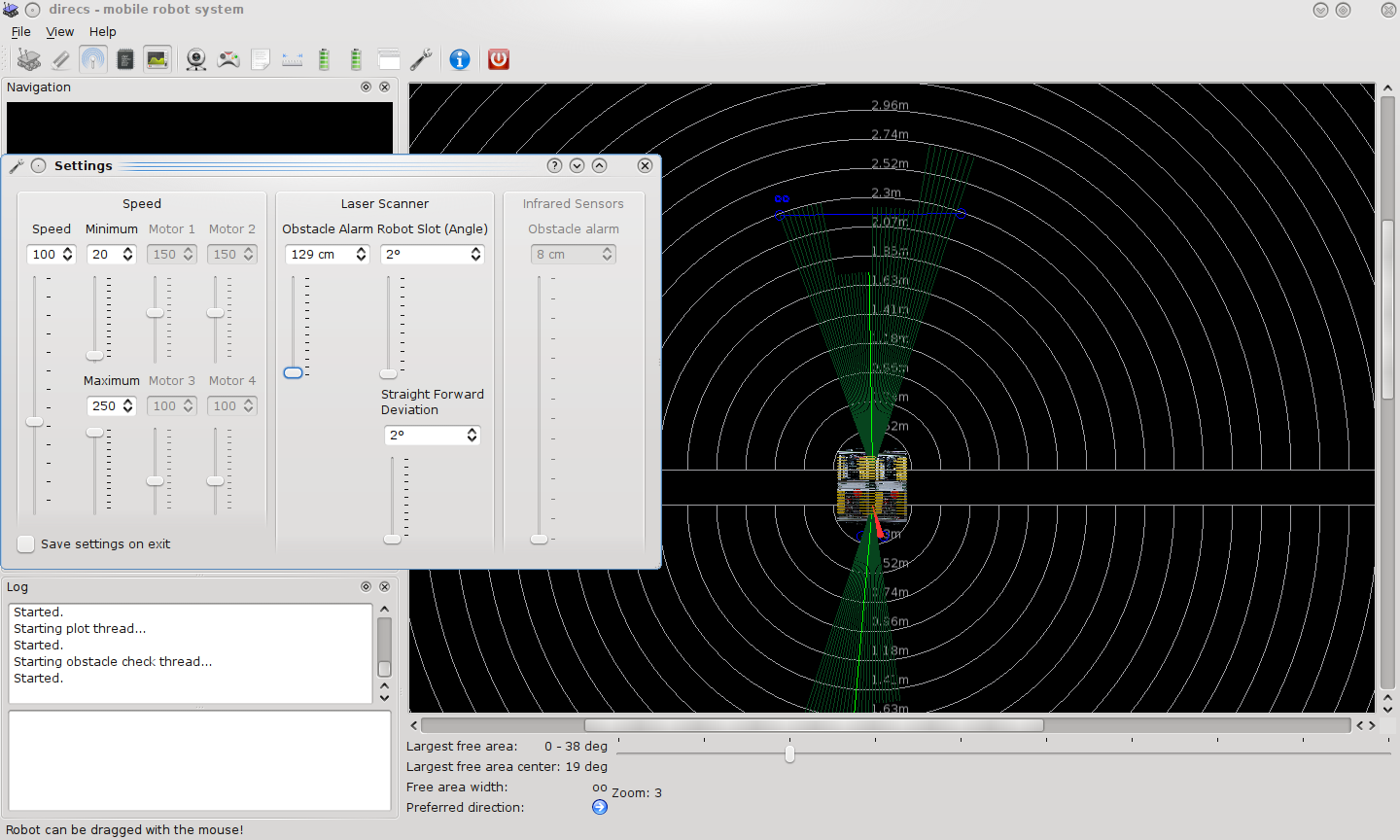
Noch nicht portiert sind sämtliche Funktionen für den seriellen Port, Sprachausgabe (espeak liegt nicht als Library vor) und OpenCV (Compiler läuft auf Fehler). Aber starten lässt sich die Applikation schon. Kommt Zeit, kommt volle Unterstützung… :-)
Wer einen Eindruck des Aufwandes haben möchte, bitte sehr; hält sich danke Qt sehr in Grenzen:
direcs/direcs.pro.user | 264 +++++++——-
direcs/src/camThread.cpp | 12 +-
direcs/src/camThread.h | 26 +-
direcs/src/direcs.cpp | 826 +++++++++++++++++++++———————
direcs/src/direcs.h | 4 +-
direcs/src/direcsSerial.cpp | 5 +
direcs/src/direcsSerial.h | 4 +
direcs/src/gui.cpp | 2 +
direcs/src/gui.h | 6 +-
direcs/src/joystick.cpp | 6 +-
direcs/src/joystick.h | 6 +-
direcs/src/laserSickS300.cpp | 25 ++-
direcs/src/laserSickS300.h | 8 +-
direcs/src/speakThread.cpp | 25 +-
direcs/src/speakThread.h | 2 +
direcs/src/src.pro | 41 ++-
16 files changed, 685 insertions(+), 577 deletions(-)









































{kind=link}