Da der Roboter rund und „hochkant“ werden soll, erfolgte als nächstes die Montage der seitlichen Albprofile und des abschließenden „Deckels“.

Da der Roboter rund und „hochkant“ werden soll, erfolgte als nächstes die Montage der seitlichen Albprofile und des abschließenden „Deckels“.
Wird Zeit, dass ich mit der Berichterstattung fortfahre. Darum soll in den nachfolgenden Bildern kurz dargestellt werden, wie die Motoren montiert wurden.
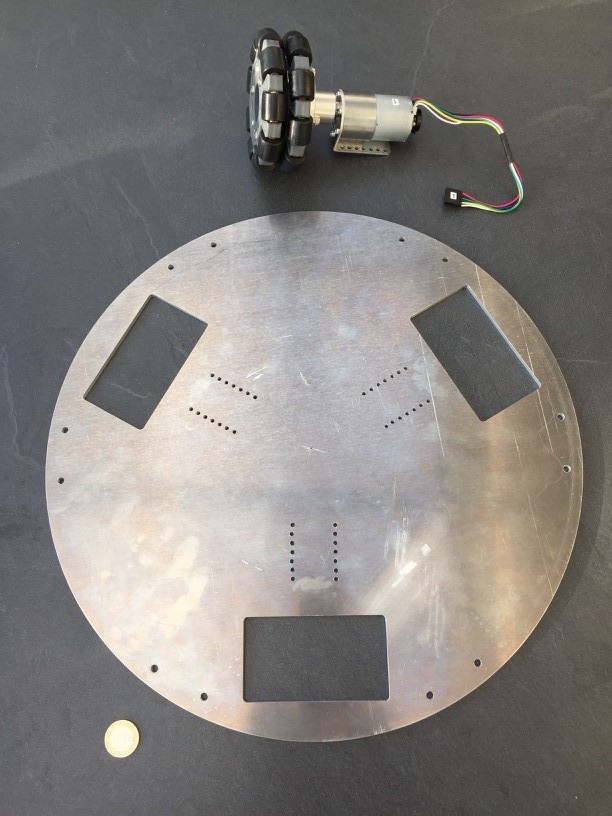
Nachdem ich mich nun recht lange und mühevoll mit SketchUp herum geschlagen habe,
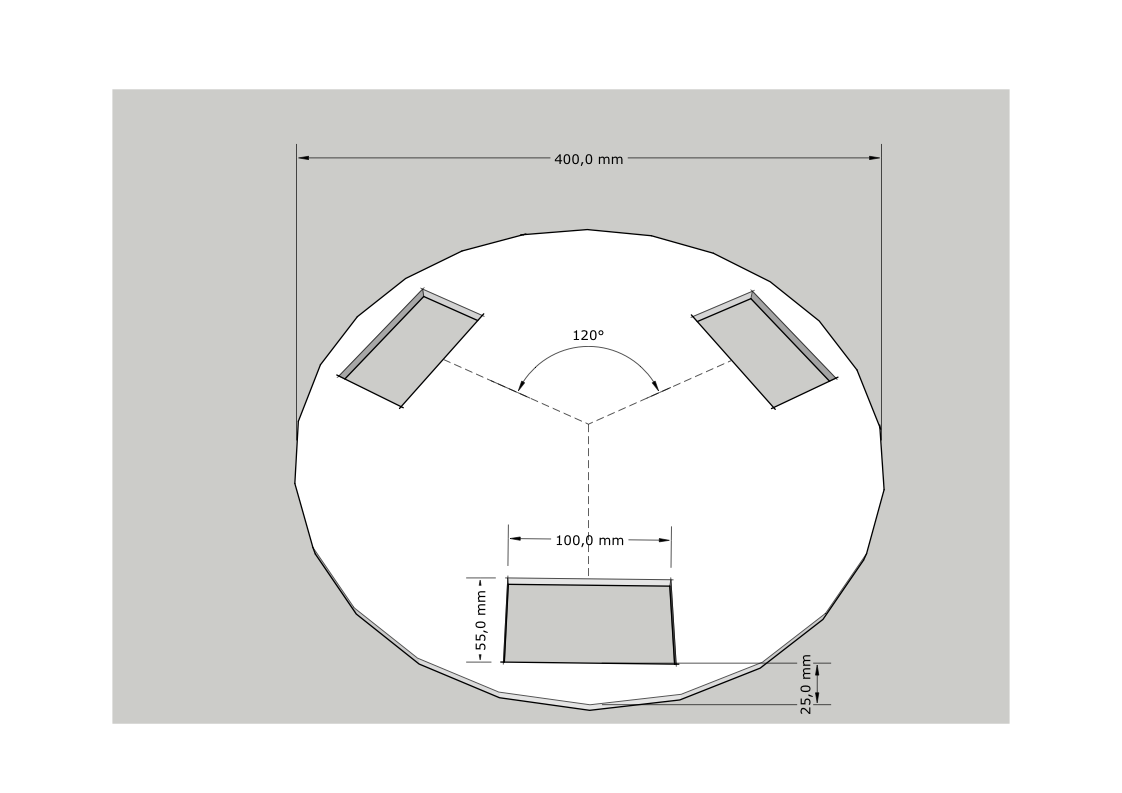
sieht man hier endlich das Ergebnis. Fettes Aluminiumplatten nach Wunsch (privat) angefertigt:
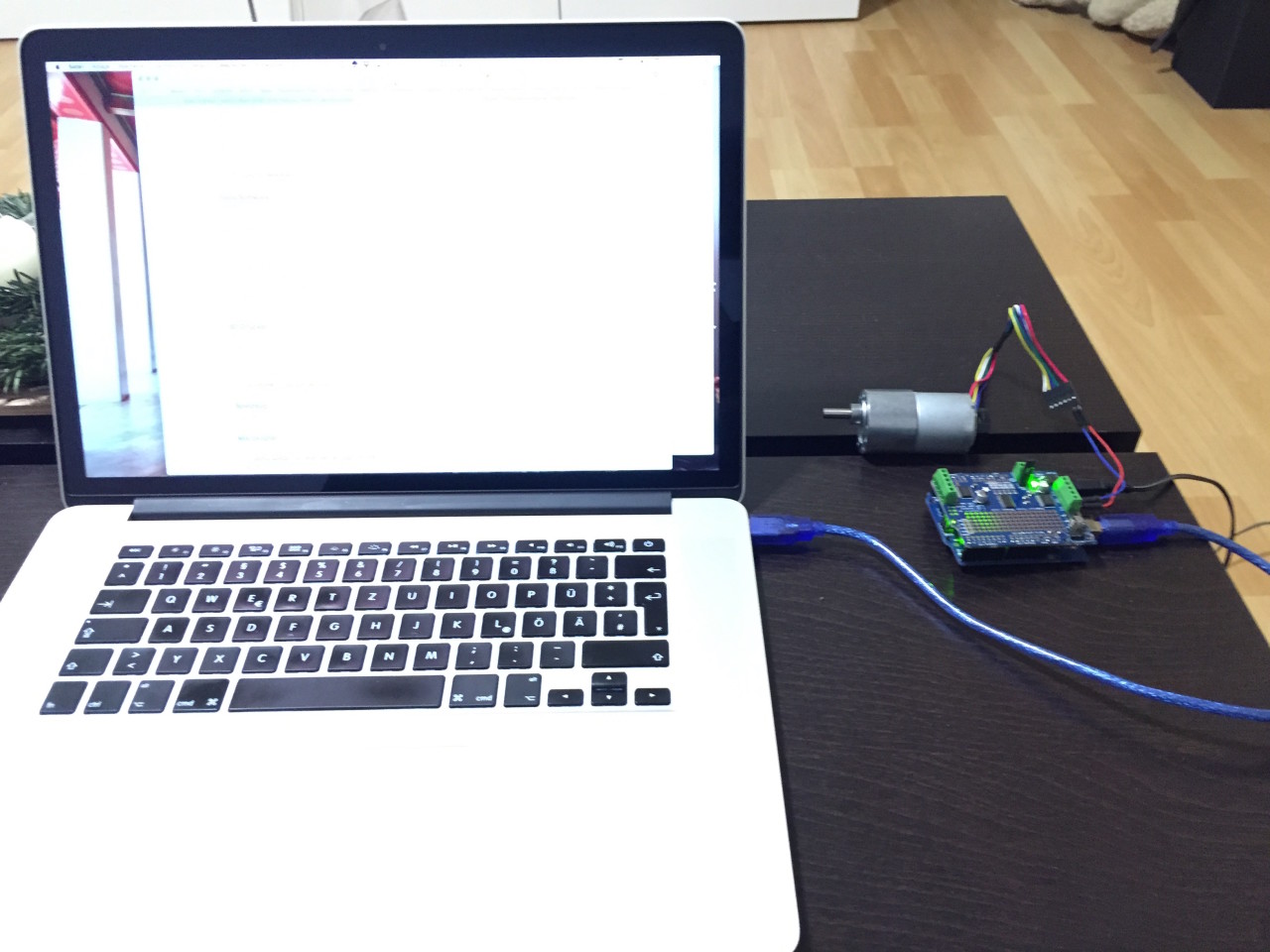
Nachdem nun das Motor Shield läuft, die Omniwheel-Plattform zusammengebaut wurde und die Apple Remote zum Laufen gebracht wurde, galt es nun, alles gemeinsam zu testen.
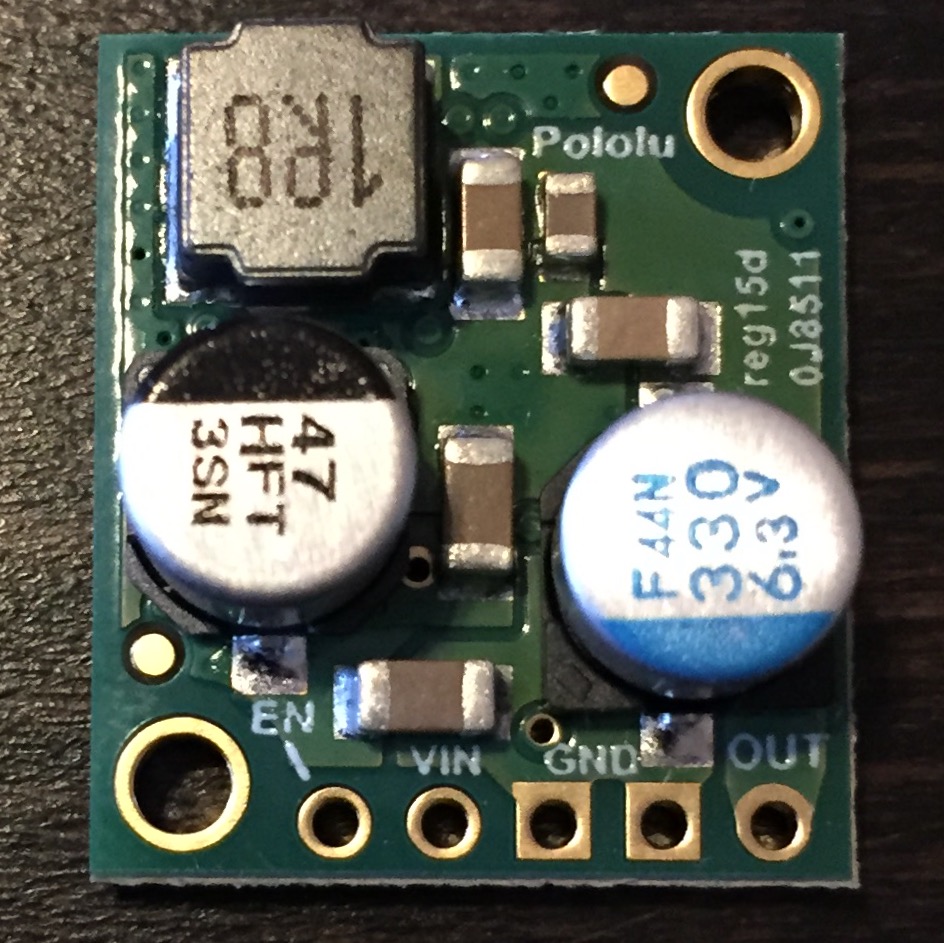
Als erstes wurde ein LiPo-Akku hinzugefügt und mit einem StepDown-Regler von Pololu verbunden. Übergangsweise wurde hier noch ein „kleiner“ 5 Ampere-reger verwendet.
Test der Omniwheel-Plattform mit Arduino, Motor Shield und Apple Remote weiterlesen
Immer schon einmal wollte ich per Apple Remote einen Arduino steuern. Und nun endlich habe ich mir die Zeit dazu genommen. Nach wirklich vielen Seiten im Netz habe ich mir die verschiedenen Teile zusammengesucht und ein Beispiel gebaut, was sehr simpel ist.
Es beruht auf der Bibliothek IRremote für den Arduino, die es bei GitHub frei zum Download gibt.
Alle Beispiele, die ich im Netz fand, konnten nicht mit den aktuellen Apple Remotes umgehen, aber letztendlich war es kein Problem diese mit den Beispielen im Code „auszulesen“ und in eigenen Code zu integrieren.
Meinen Sourcecode gibt es hier zum Download. Und das beste: Er funktioniert mit mit den beiden letzten, aktuellen Apple Remotes (aus Aluminium):

230V Relais schalten mit Arduino und Apple Remote weiterlesen
Eine Datenübertragung per Bluetooth wurde in diesem Beitrag beschrieben. Hier soll nun erläutert werden, wie einzelne Pins mit dem Arduino per Bluetooth mit einer iOS-App auf dem iPhone geschaltet werden können. Die Pins können übrigens auch in der iOS-App ausgelesen werden, was hier noch nicht gezeigt wird, aber hier erklärt wird.
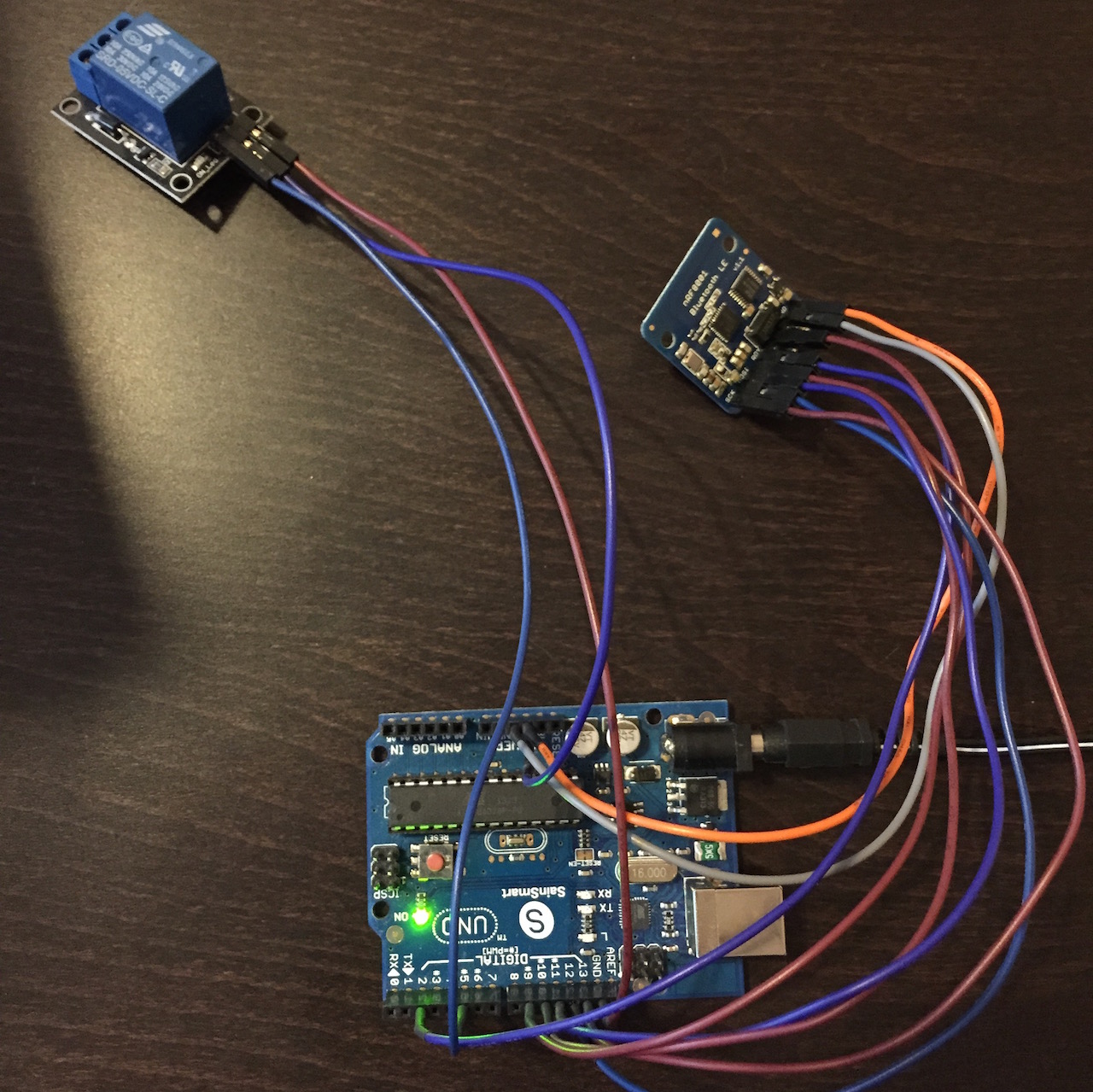
Dieser Aufbau eignet sich grundsätzlich zum Schalten eines 230V Relais (Verbraucher) mit dem Arduino – hier sind aber die gängigen Bestimmungen zu beachten und es besteht ein Risiko des tödlichen Stromschlags! Der Nachbau erfolgt daher in jedem Fall auf eigene Gefahr!
Hier der Aufbau der Schaltung. Für das Relais kann jeder Ausgangs-Pin des Arduino verwendet werden. Die Verkabelung des Bluetooth-Moduls ist hier beschrieben.
Adafruit Bluefruit LE – Test von Arduino Uno mit Bluetooth LE und iOS – Teil 2 weiterlesen
Schön wäre es, wenn man einen Roboter per (iOS) App fernsteuern könnte. Was liegt da näher, als dieses per Bluetooth LE zu tun. Dieses hat bei iOS den Vorteil, dass es nicht irgendwie kompliziert von Apple zertifiziert werden muss.
Ein sehr günstiges Bluetooth LE-Modul gibt es von Adafruit für derzeit 19 € (zum Beispiel bei EXP TECH erhältlich).
Eine hervorragende Anleitung für das Modul gibt es wie immer bei Adafruit auf englisch. Hier nun die Kurzversion meines abendlichen Schnelltests. Das ganze hat keine halbe Stunde gedauert! Adafruit Bluefruit LE – Test von Arduino Uno mit Bluetooth LE und iOS – Teil 1 weiterlesen
Gestern wurden endlich die neuen Teile für den Omnibot getestet. Hier ein paar Eindrücke und ein kurzes Video.
Als erstes wurde das Code-Beisspiel aus der Adafruit-Library am MacBook getestet.
2014 ist nun fast Geschichte und auf dieser Website hat sich nun wirklich lange nichts getan. Es wird also endlich Zeit für einen neuen Roboter. Und der Name steht auch bereits fest: Omnibot?
Warum dieser Name? Nun, das ist vielleicht recht einfach zu erraten, wenn man die ersten Teile dafür sieht… Lasst euch überraschen, wie es weitergeht!

Okay, es ist kein Holzrahmen, aber so etwas wie Sperrholz/MDF (Korrekter Name gerade entfallen). Ein Freund von einem Freund fräste mir den schicken Rahmen per CNC. Hintergrund war, dass ich endlich mal einen Rahmen haben wollte, der etwas bei Stürzen verträgt, also nicht gleich bricht. Und da sich so lange in diesem Blog nichts getan hat, hier nun ein paar aktuelle Fotos:





Und er fliegt echt klasse. Sehr stabil. Null Vibrationen. Wer hätte das gedacht? Back to nature. ;-)