Einen eigenen ROBOTER bauen? Seid dabei und BESTIMMT MIT! Begleitet mich auf dieser spannenden Reise.
Gemeinsam erlebt ihr mit, wie ich SCHRITT FÜR SCHRITT einen Roboter baue.
► Erhaltet TIPPS, wie sowas geht.
► Stellt eure FRAGEN.
► Gebt mir Hinweise, wie IHR es machen würdet.
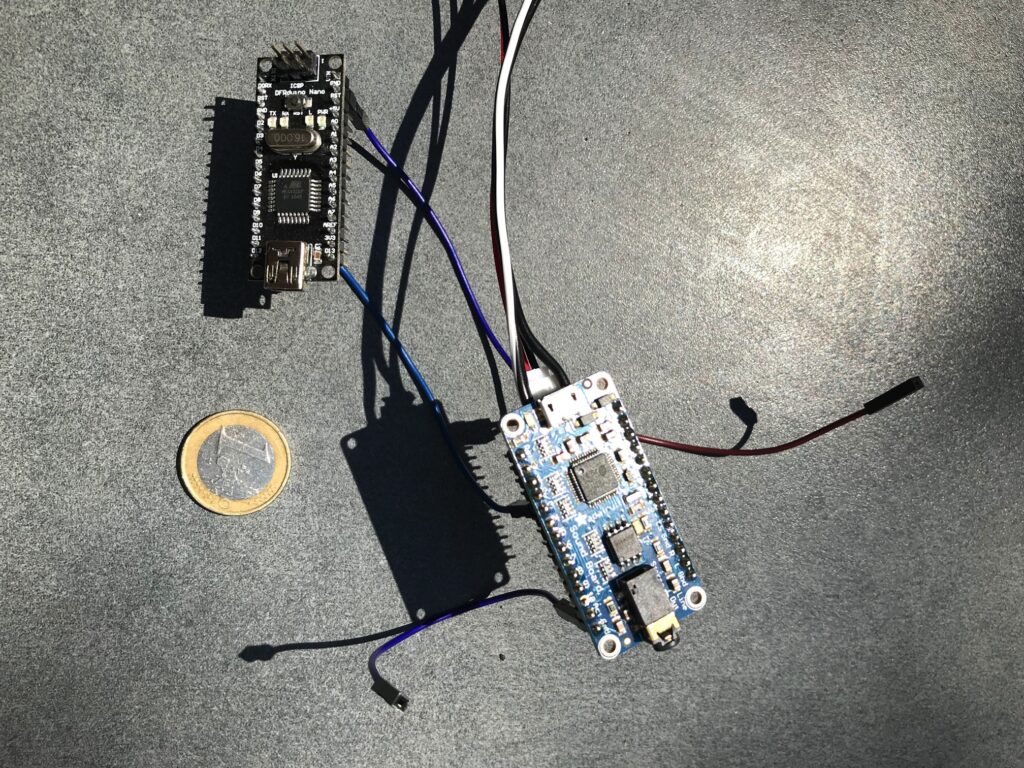
► Raspberry? ESP32? Arduino? GESTALTET den Roboter mit und bestimmt den Verlauf.
► Erlebt dabei was nicht klappt, was gut funktioniert und warum.
Ich freue mich über eure Likes und Abos, damit ihr immer auf dem Laufenden bleibt!
Euer Markus Knapp – Einfach machen!
BONUS
► Robotiklabor – Der Podcast rund um Robotikthemen
- als Videos hier im Kanal https://www.youtube.com/playlist?list=PLF9xHPwpV03jPedFMM05W50dv1uzjjQeB
- als Audio unter https://robotiklabor.de