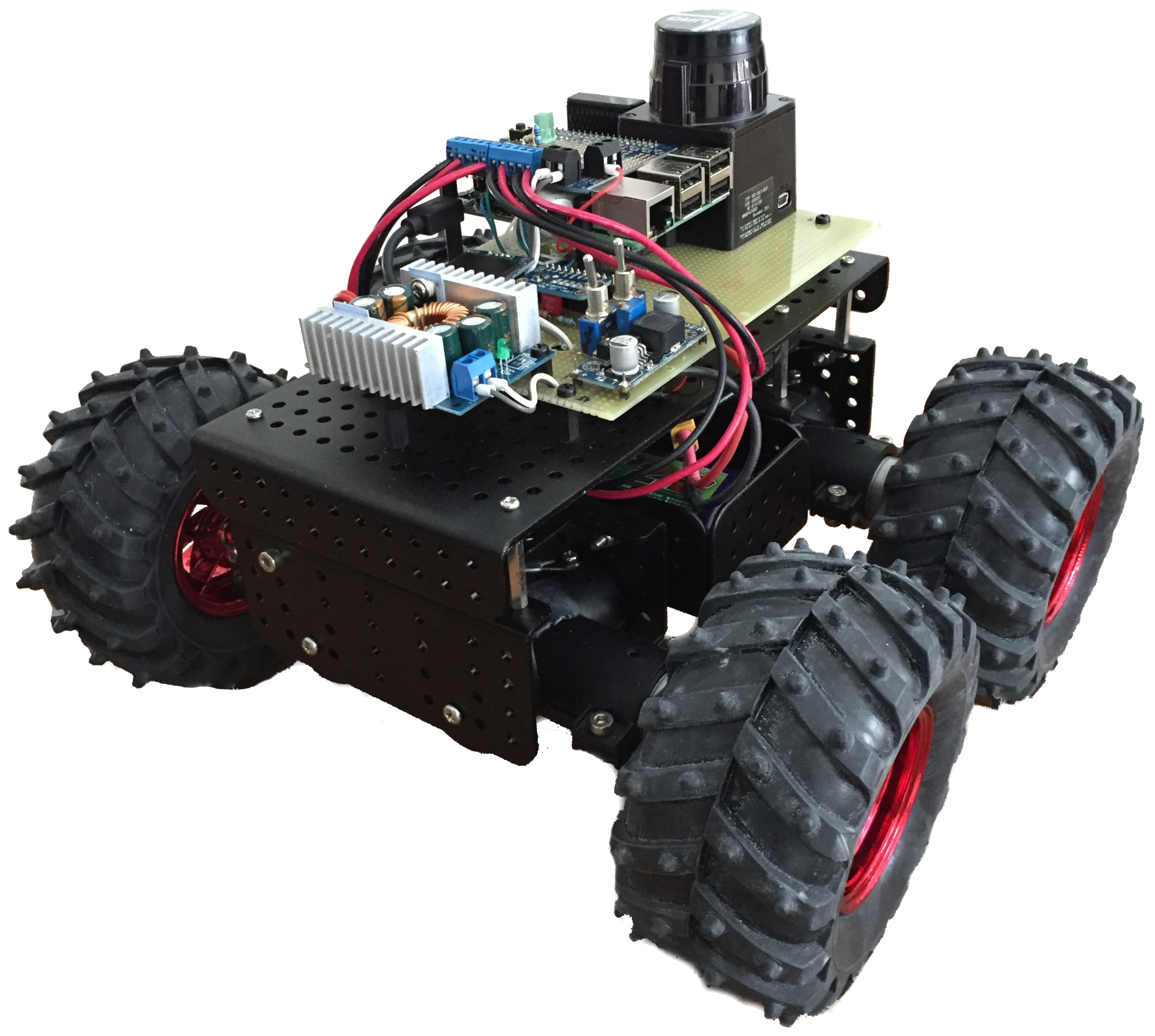
Wenn mein aktuell gebauter minibot mit vier Rädern sich um die eigene Achse drehte, kam es oft vor, dass eines der Räder blockierte. Dies ist abhängig vom Untergrund und der Geschwindigkeit.
Da der Antrieb des Roboters ohnehin demnächst geändert werden soll, habe ich mich entschlossen hier schon mal vorzugreifen und ein Lenkrad statt der beiden Hinterräder einzubauen. Goodbye Allradantrieb!
Dieses Mal ein kurzer Zwischenbericht bei der möglichen nächsten Umstellung meines Roboter minibot.
Da ROS sehr viele fertige Pakete zur Ansteuerung von Aktoren gibt, und diese dann auch gleich Positionsdaten liefern, entschied ich mich zum Kauf meiner ersten (teuren) Dynamixel-Servos – konkret: Dynamixel AX-12W.
Sehr sehr sehr lange hat sich bei meinem Roboter minibot nichts mehr getan, aber das soll sich nun wieder etwas ändern. Gamepad mit ROS und minibot weiterlesen
Na ja, was soll man von fertig aufgebauten, mit Heißkleber zugeschmadderten Kabeldurchführungen auch halten…
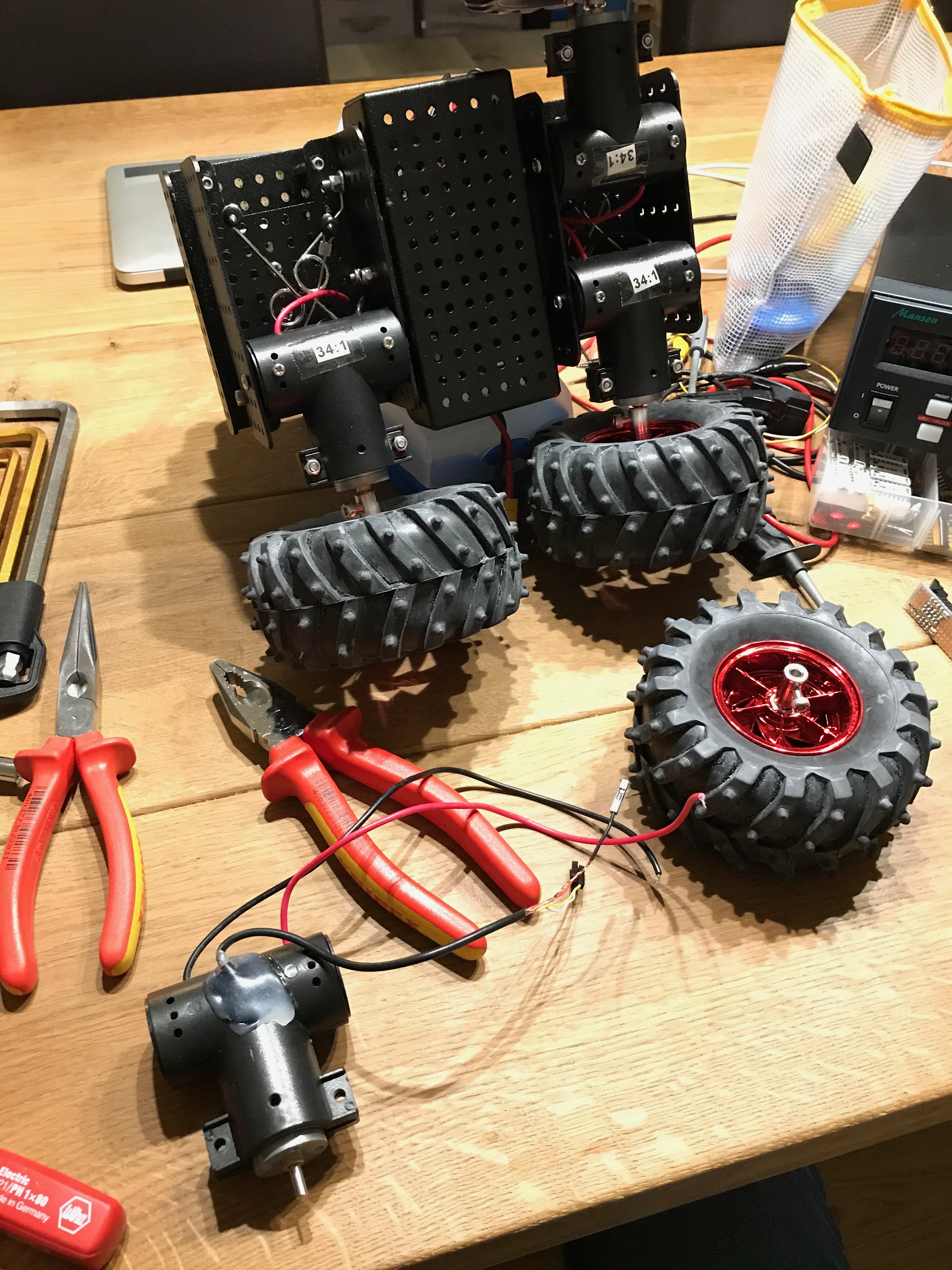
Nach langer Fehlersuche mit einem der Motorencoder stellte sich schlicht und einfach heraus, dass die Lötstellen von wirklich schlechter Qualität sind; na ja und die Leitungen eigentlich auch. Aber gut, flus das ganze auseinander gebaut, vom Kleber befreit und neu verlötet:
Nicht wirklich leicht zu demontieren…
Vorher
Nachher
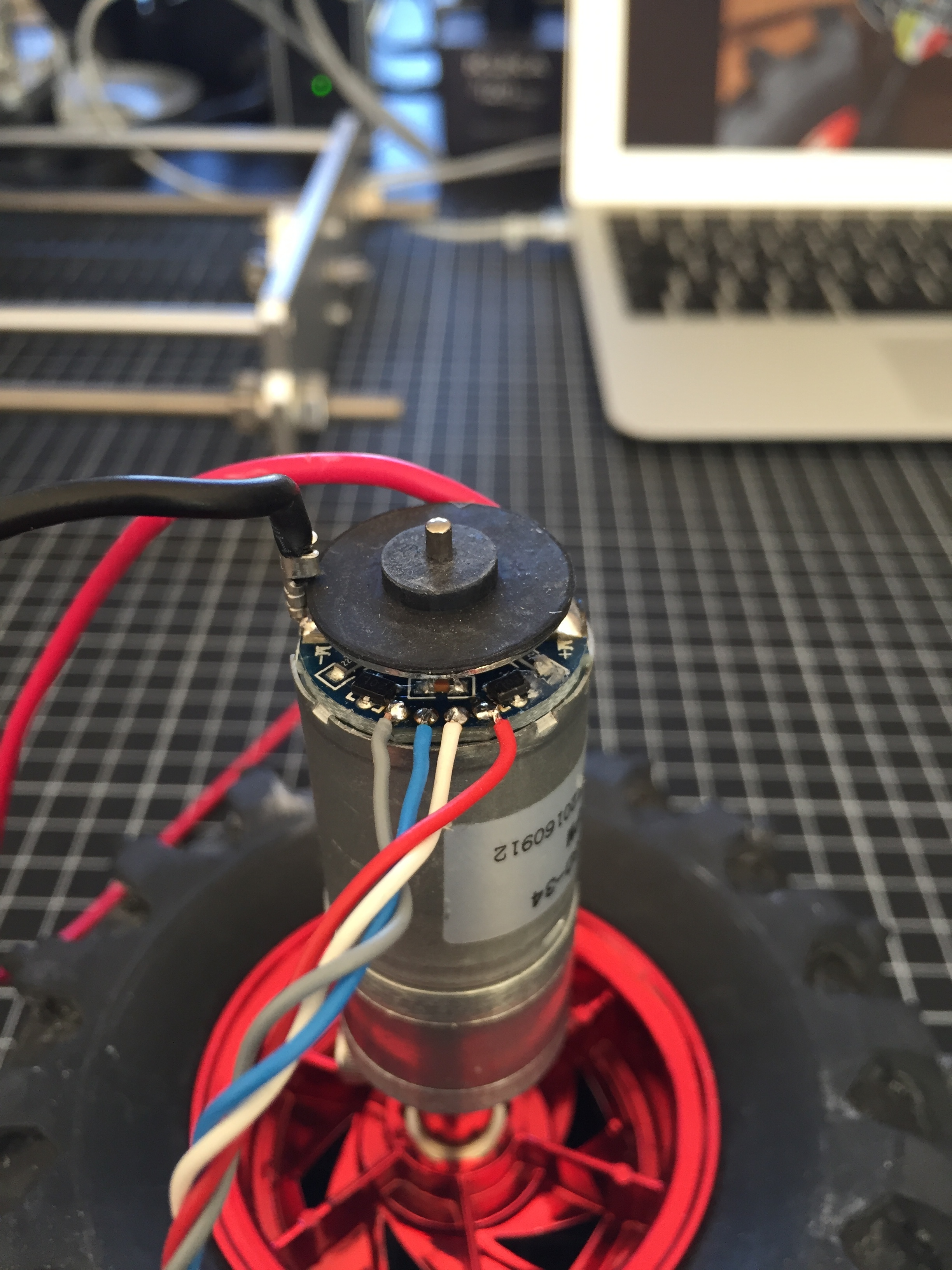
Toll dann, wenn man alles fertig hat und nach einiger Zeit wieder eine Leitung ab ist… Hatte ich erwähnt, dass die Leitungen offenbar nicht die tollsten sind? Also gut, nun eigene angelötet und hoffen, dass diese länger halten:
Vielleicht hat ja noch jemand das Problem, ein nagelneuer Raspberry Pi 3B+ ist da und dann das: die bisherige SD-Karte aus „altem“ RasPi in den neuen gesteckt, aber er bootet einfach nicht. Raspberry Pi 3 B+ bootet nicht – grüne LED blinkt weiterlesen
Da ich mit dem neuen Chassis ja bessere Odometrie bekommen wollte, als mit dem Raupenantrieb, war es langsam an der Zeit die Encoder der Motoren zu verkabeln.
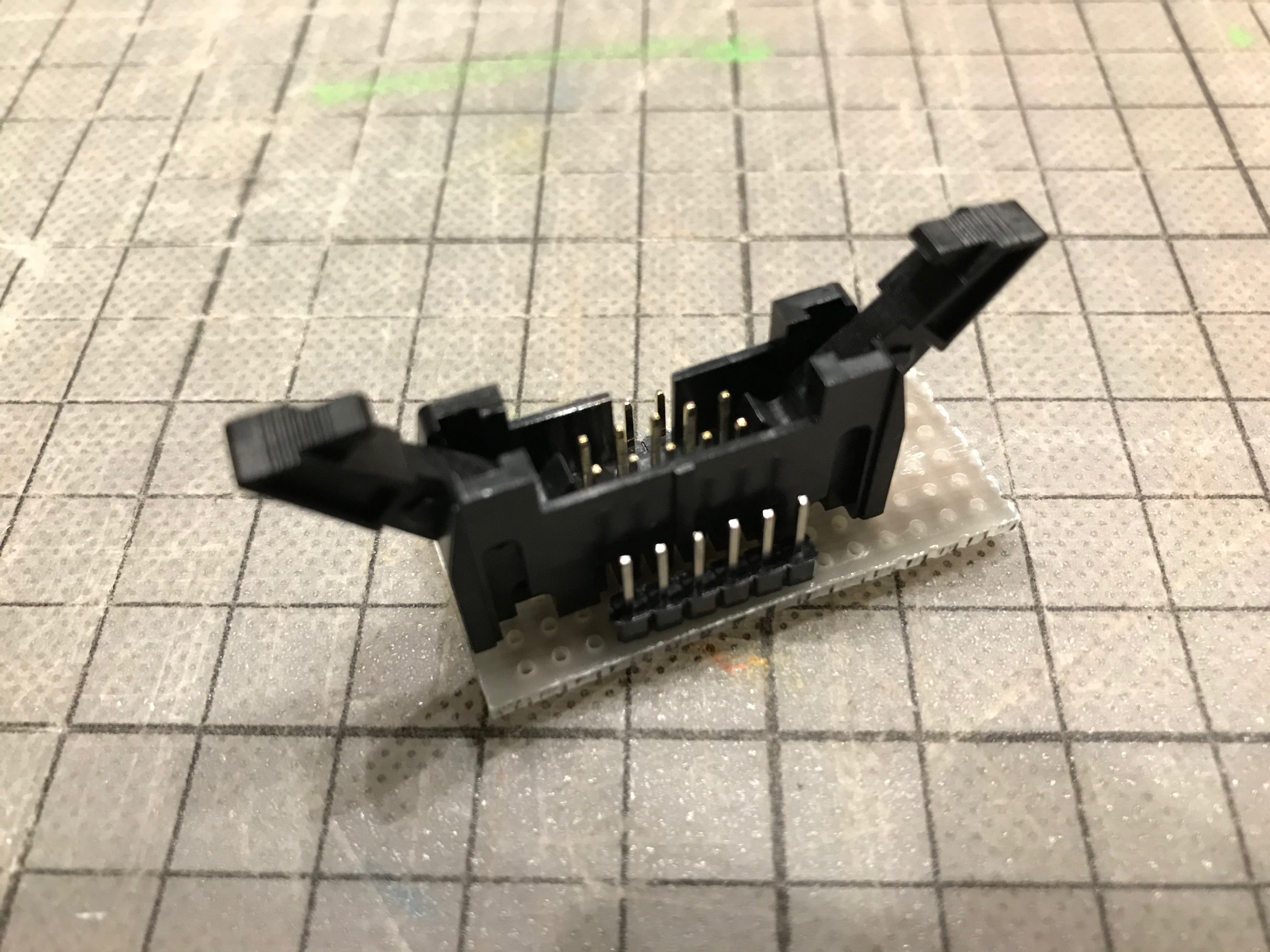
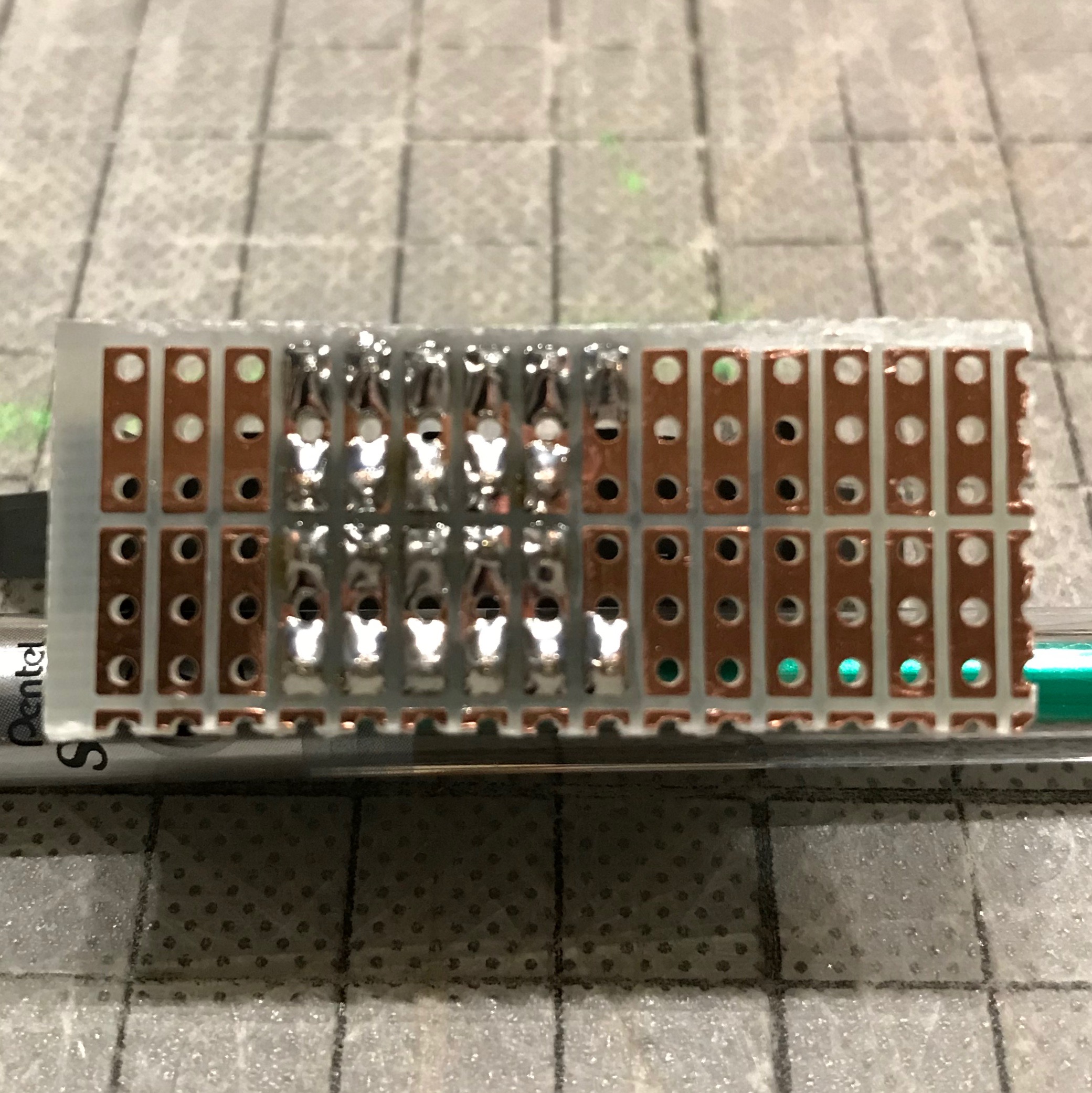
Hier sprechen wir von vier Leitungen pro Motor: GND, 3.3 Volt, „links“ und „rechts“. Diese sollen am besten per Flachbandkabel mit dem Raspberry Pi verbunden werden. Hierzu habe ich mir eine kleine Adapterplatine mit Wannenstecker gelötet:
Auf die kleinen Pins kommen die Stecker von den Motoren.Etwas unscharf, aber man bekommt eine Idee.
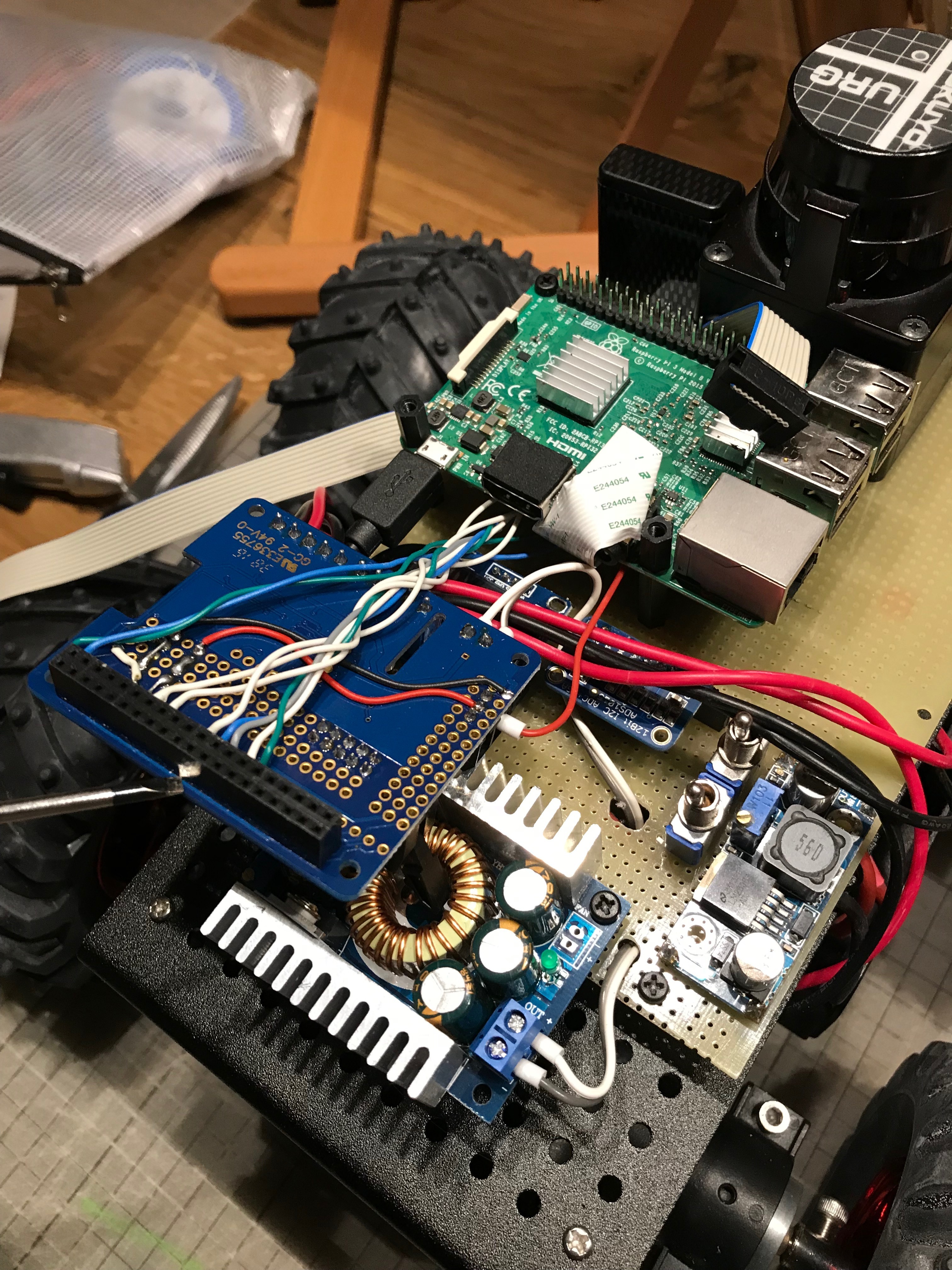
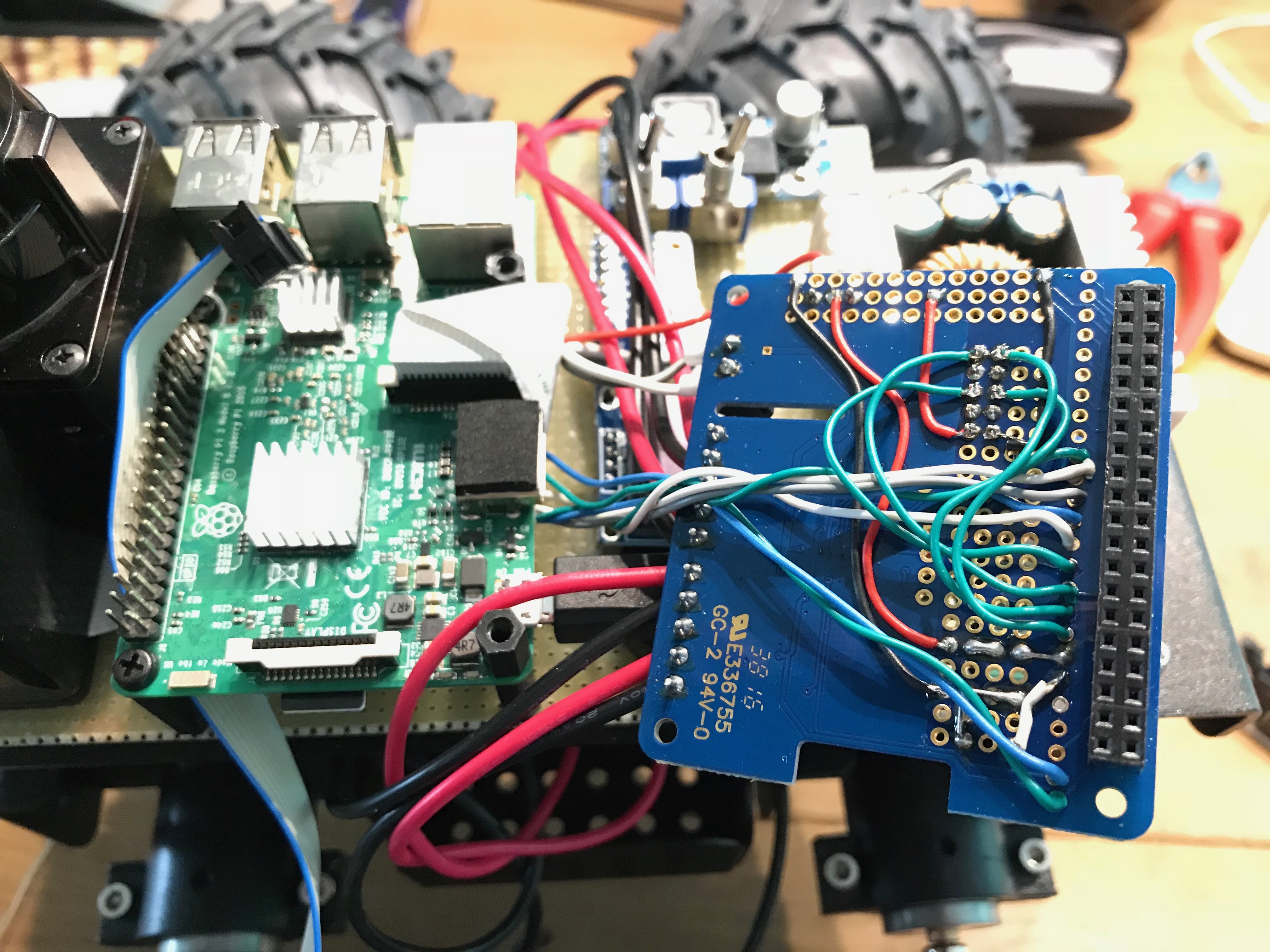
Auf dem Motor HAT für den Raspberry Pi ist praktischerweise noch Platz für eigene Bauteile, hier habe ich nun den Wannenstecker für das Flachbandkabel als Gegenstück eingelötet und mit den GPIOs der Pi verbunden.
Die Unterseite des Motor HATDie vier grünen Leitungen sind jeweils für die Richtung „vorwärts“ eines Motors.
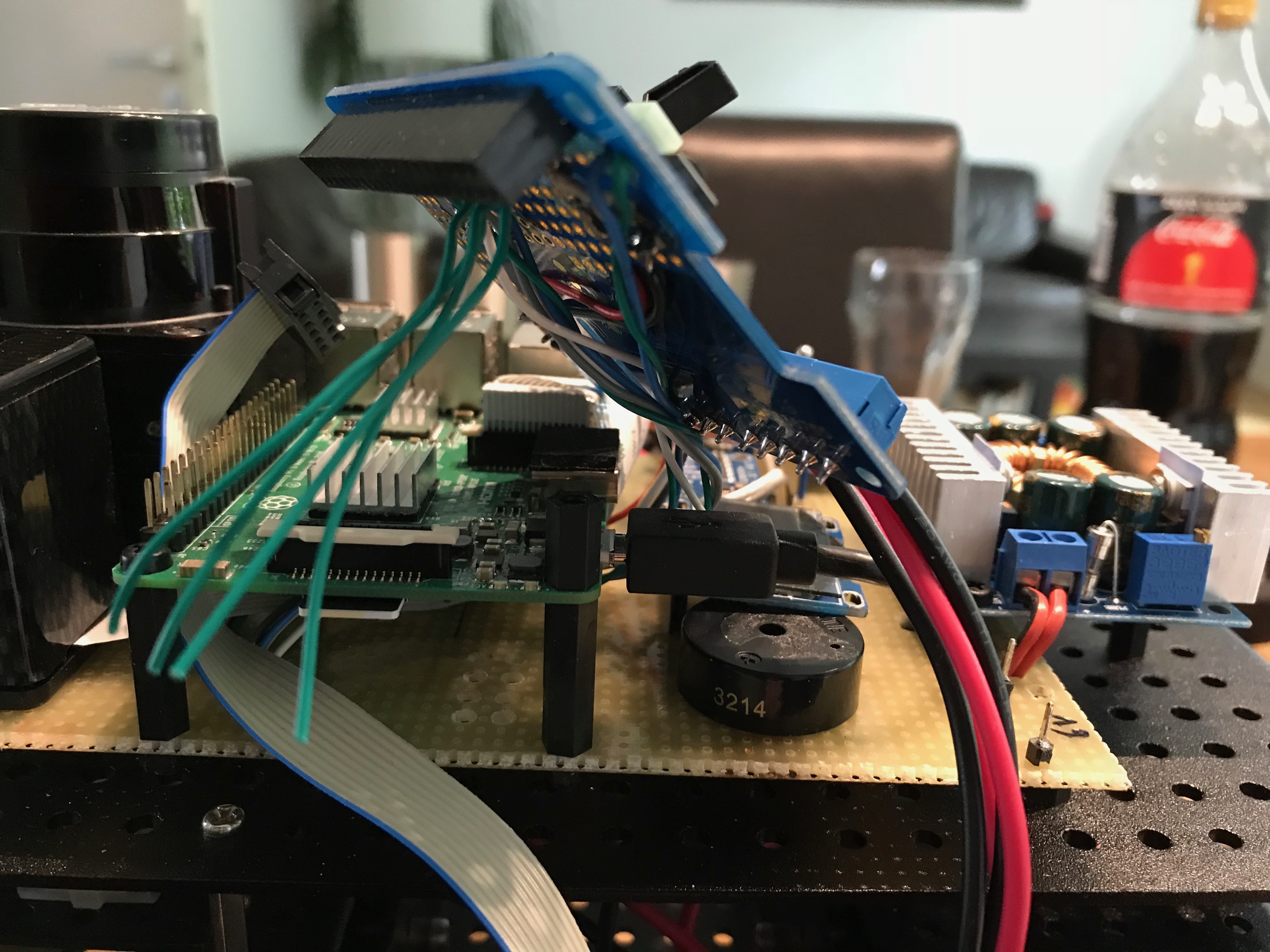
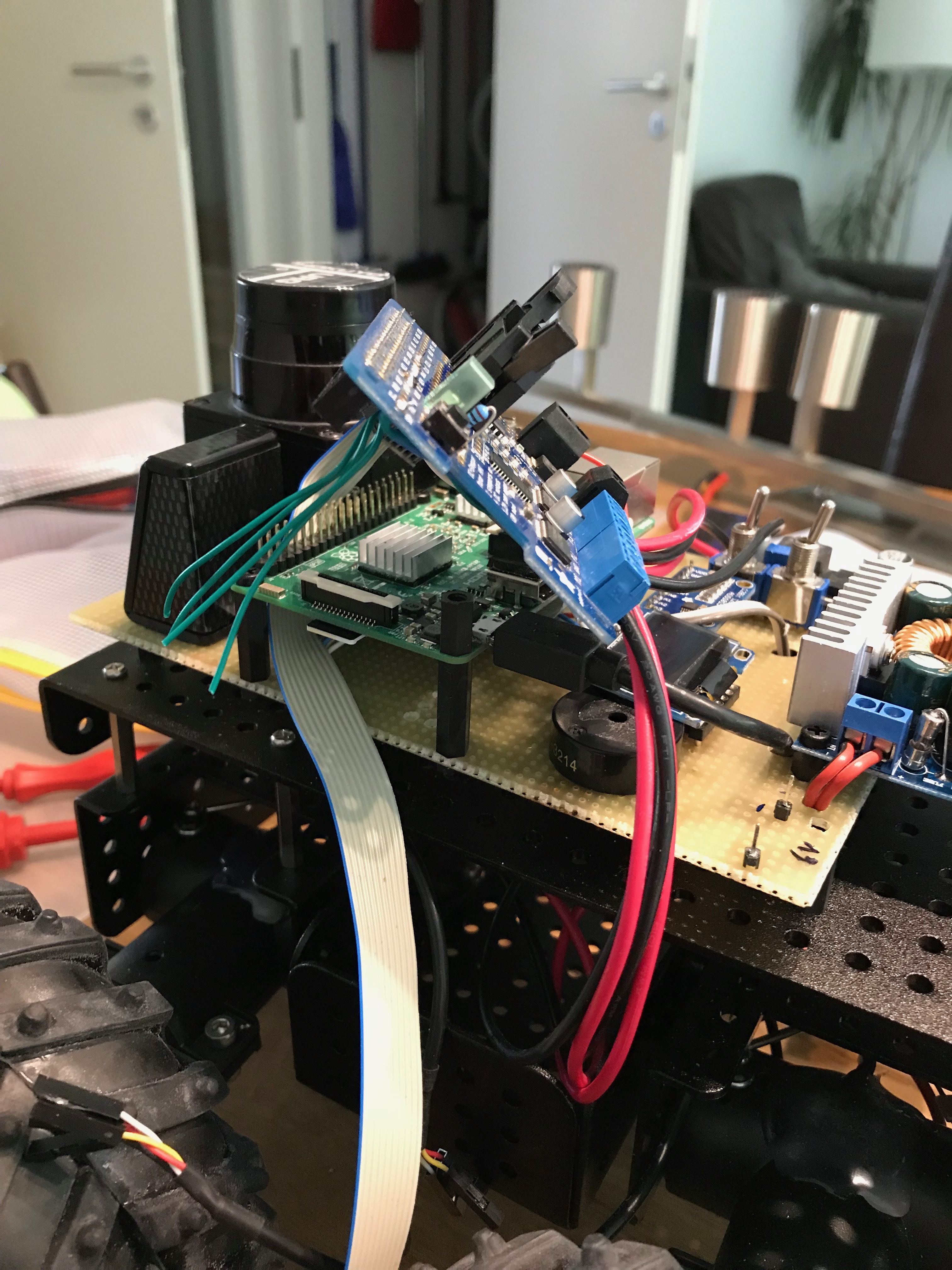
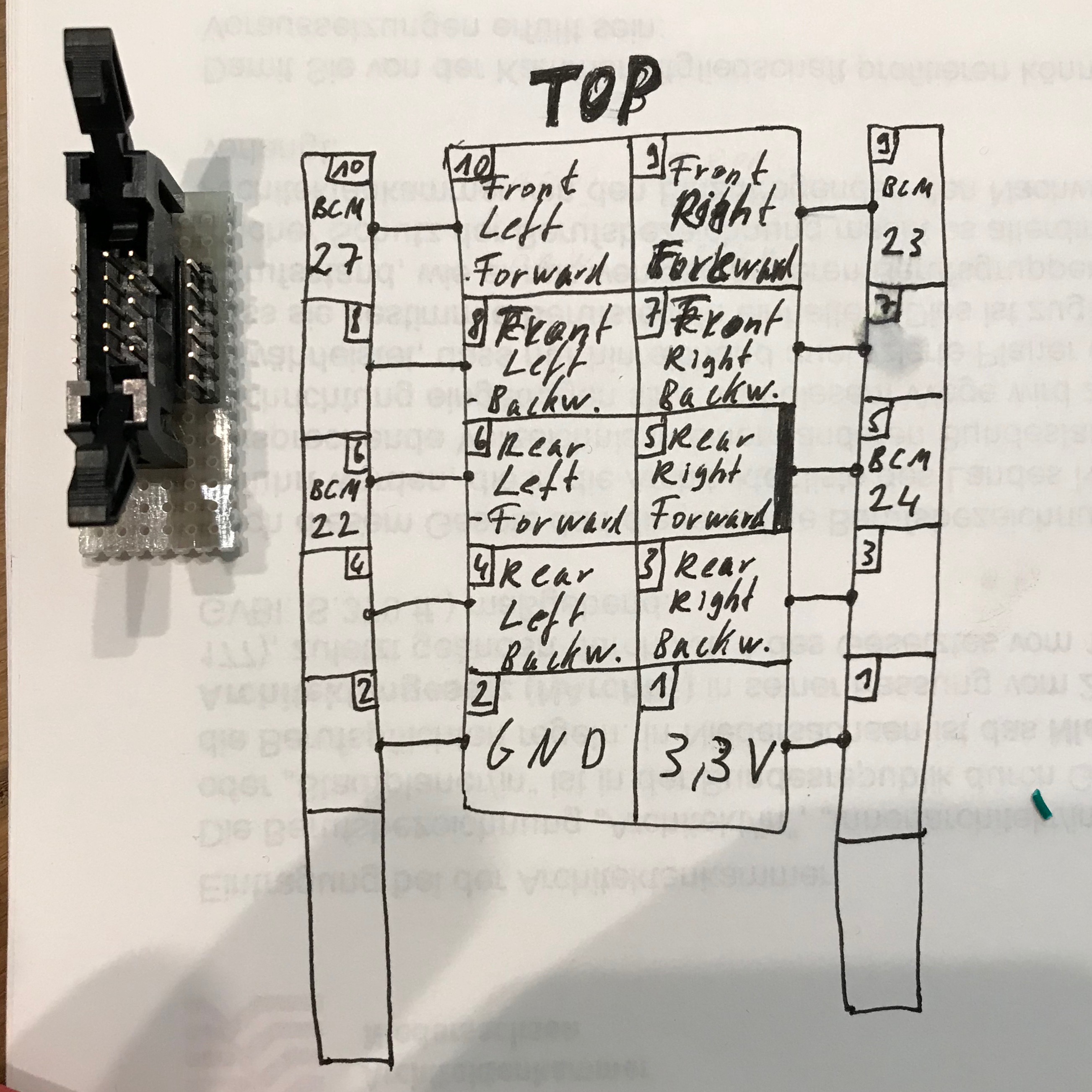
Und da man am Ende immer vergessen hat, wie die Belegung war, hier schnell ein Foto für meine eigene Dokumentation:
PS.: Ja, hier fehlen noch ein paar Pins links und rechts für GND und 3,3 Volt. Kommen…!
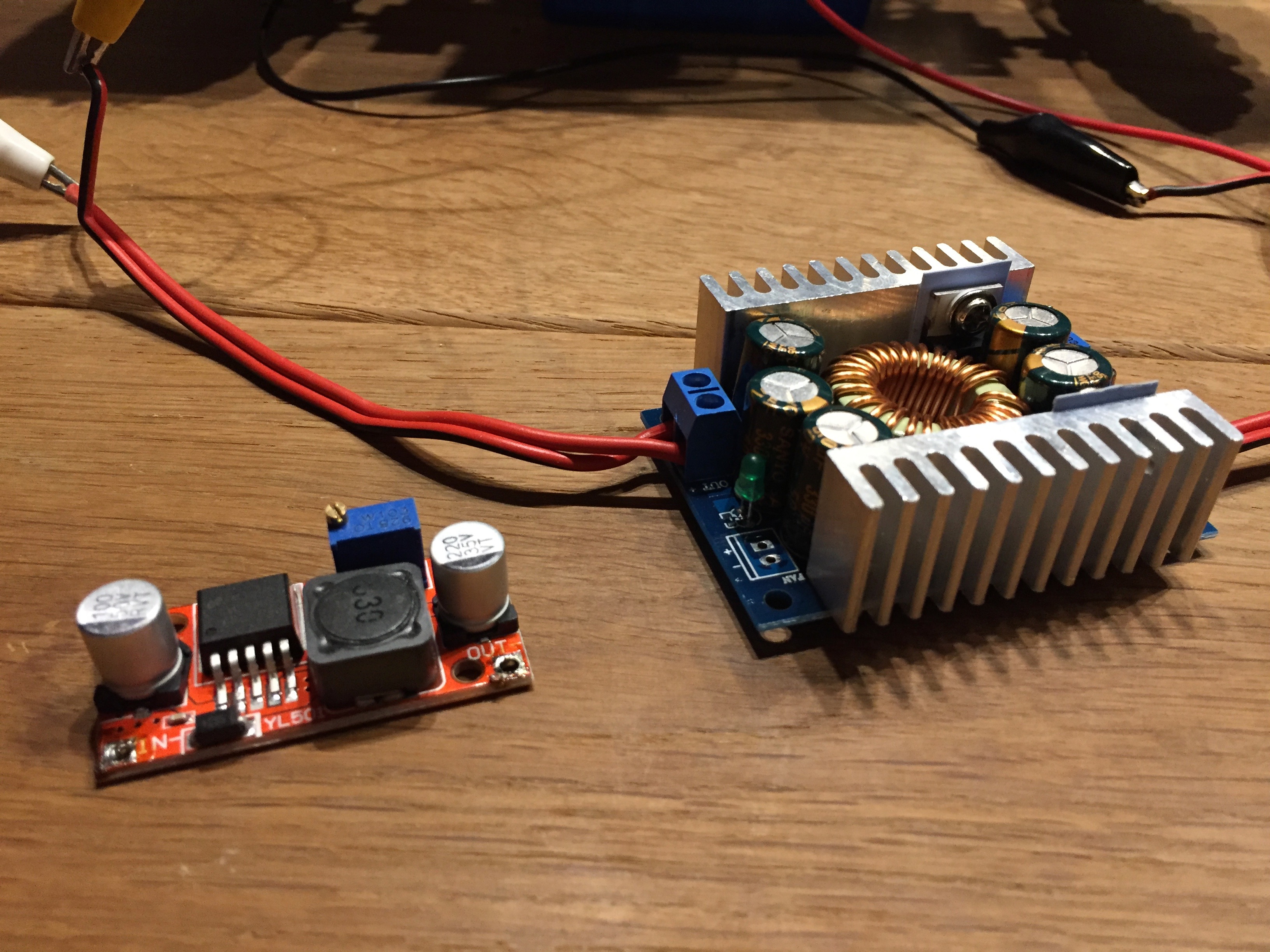
Durch das neue Chassis für den minibot, und damit den neuen vier Motoren, stieg der Stromverbrauch derart an, dass ein neuer Schaltregler her musste. Dieser regelt die Spannung von der LiPo-Batterie auf 6 Volt für die Motoren bzw. das Motor-Hat herunter.
minibot – alter (links) und neuer Schaltregler (rechts)
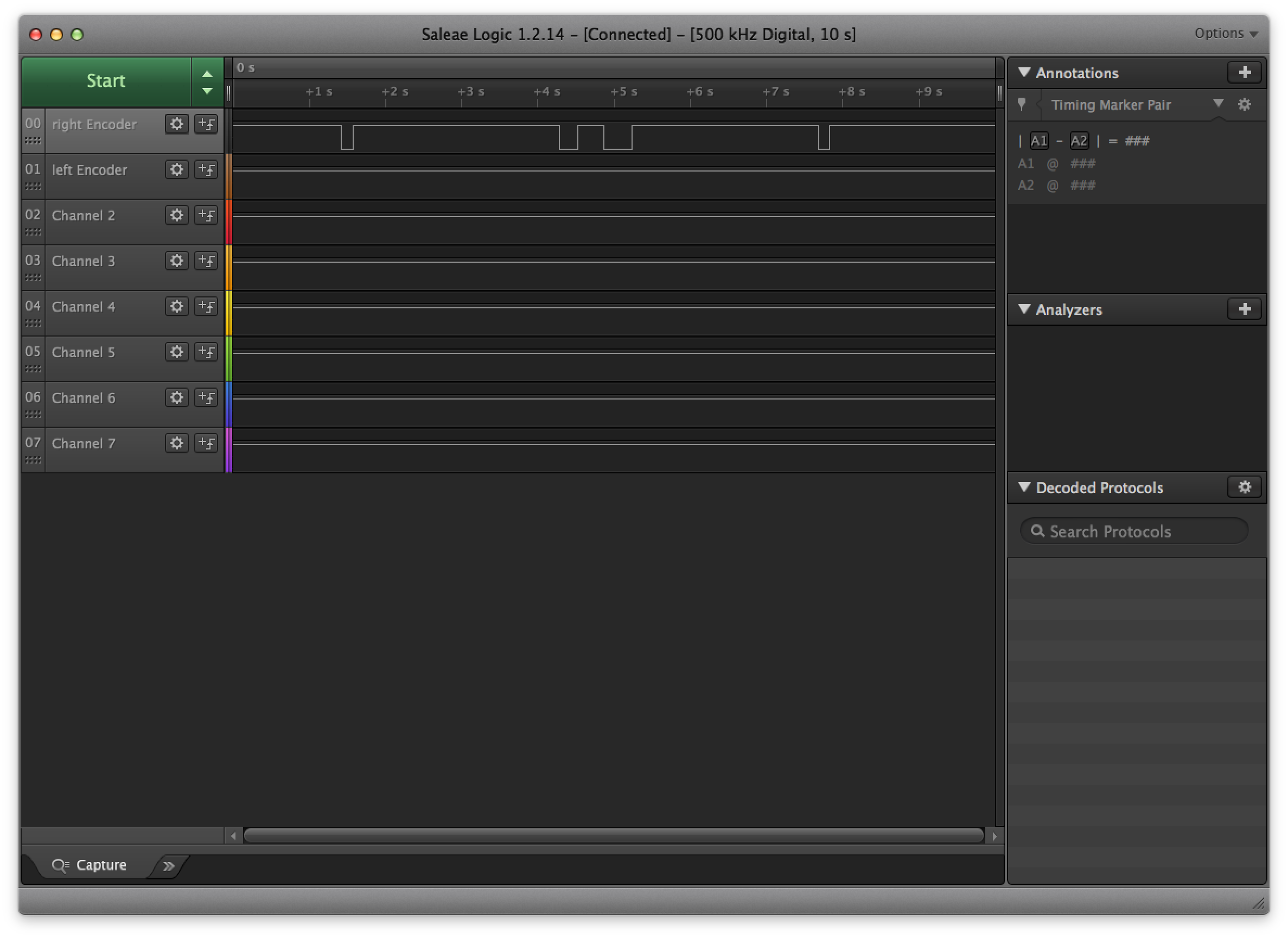
Wie sich bei Tests herausstellte, sind die zuvor aufwändig montierten Lichtschranken/Encoder offenbar nicht das Gelbe vom Ei. Wie man im folgenden Screenshot gut erkennen kann, erzeugt die Lichtschranke nämlich Impulse, obwohl die Räder still stehen: