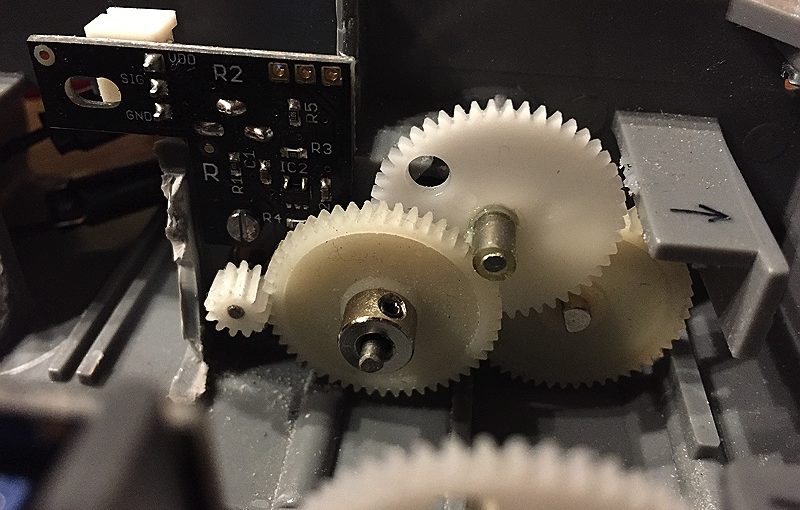
Da ich mit dem neuen Chassis ja bessere Odometrie bekommen wollte, als mit dem Raupenantrieb, war es langsam an der Zeit die Encoder der Motoren zu verkabeln.
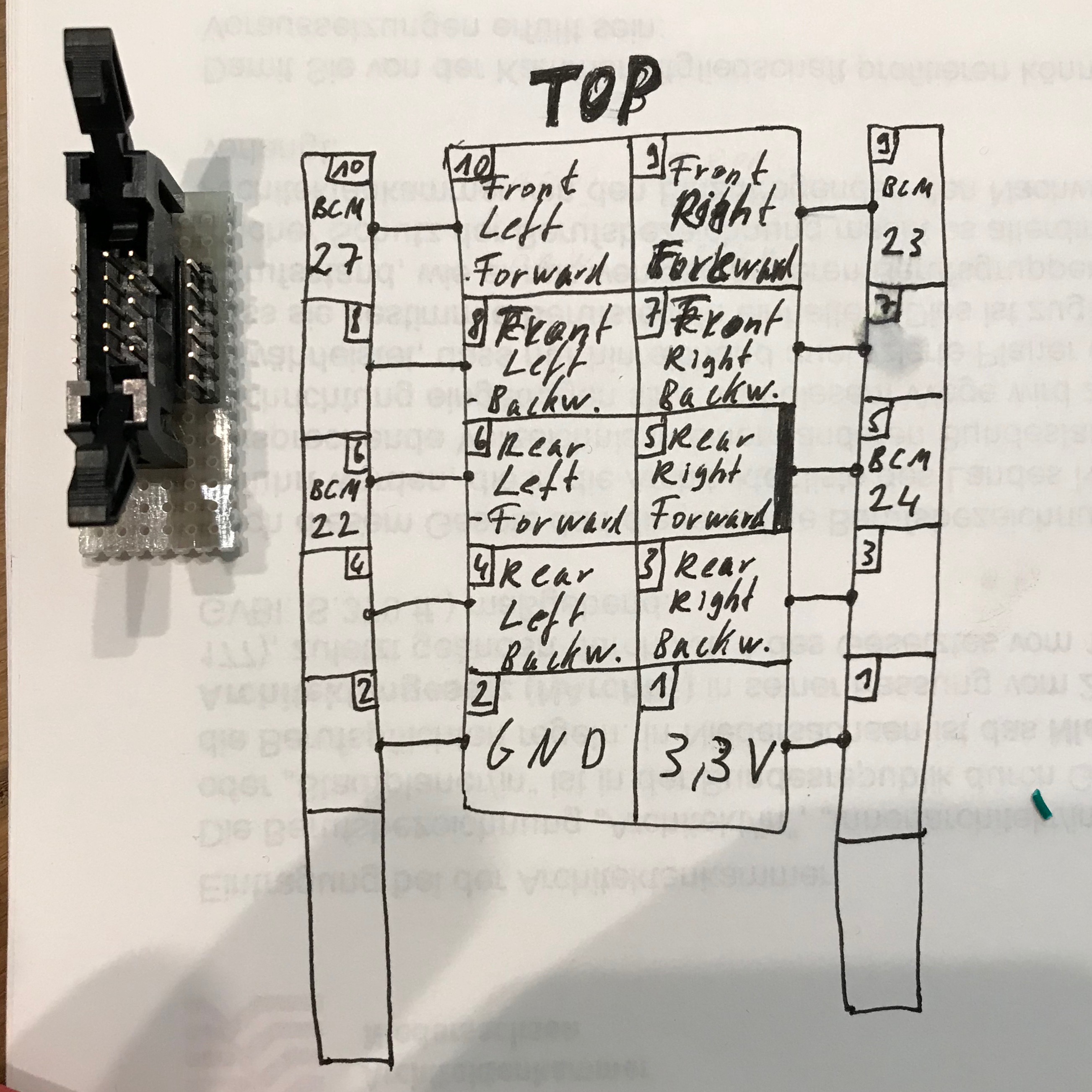
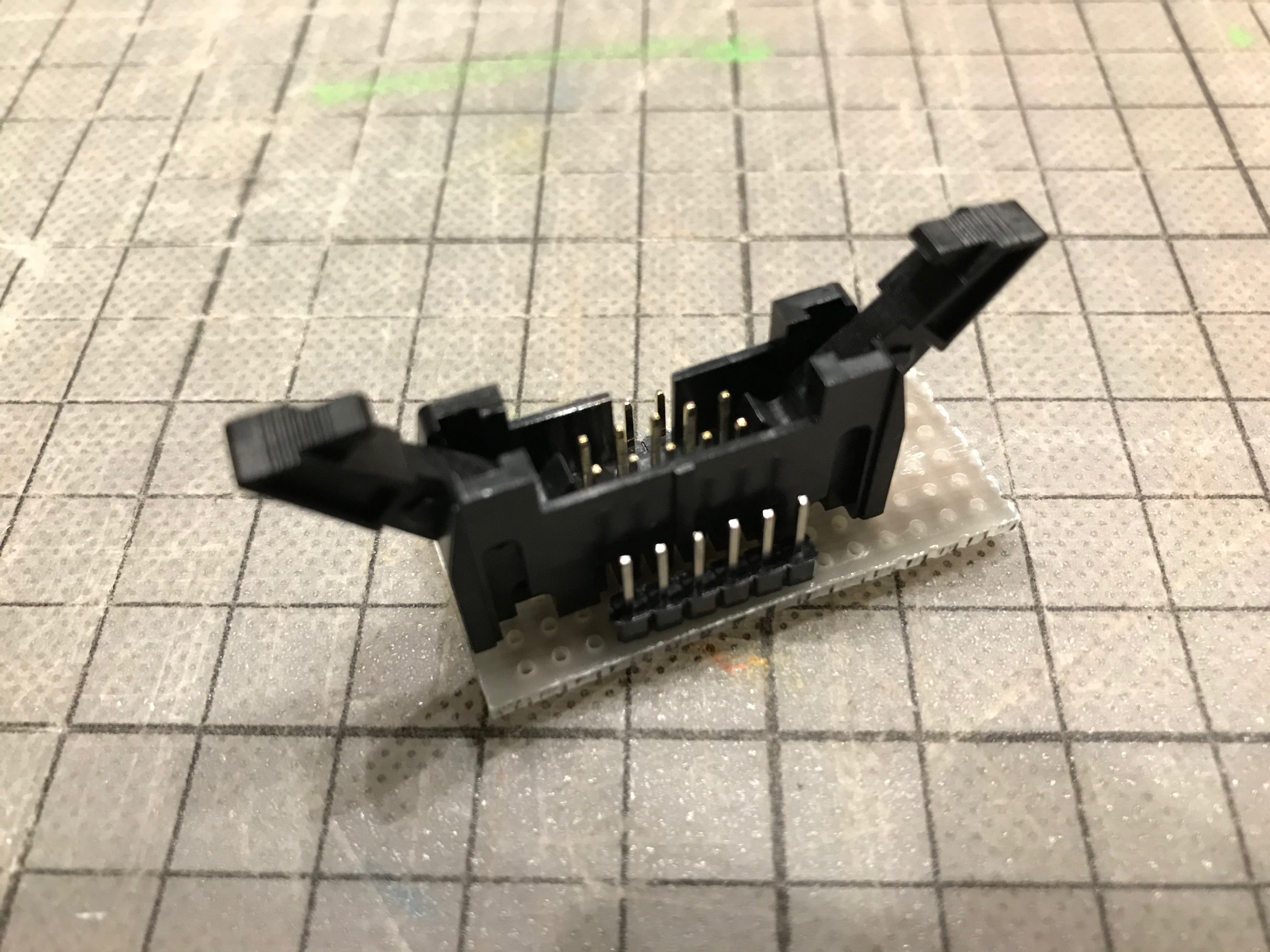
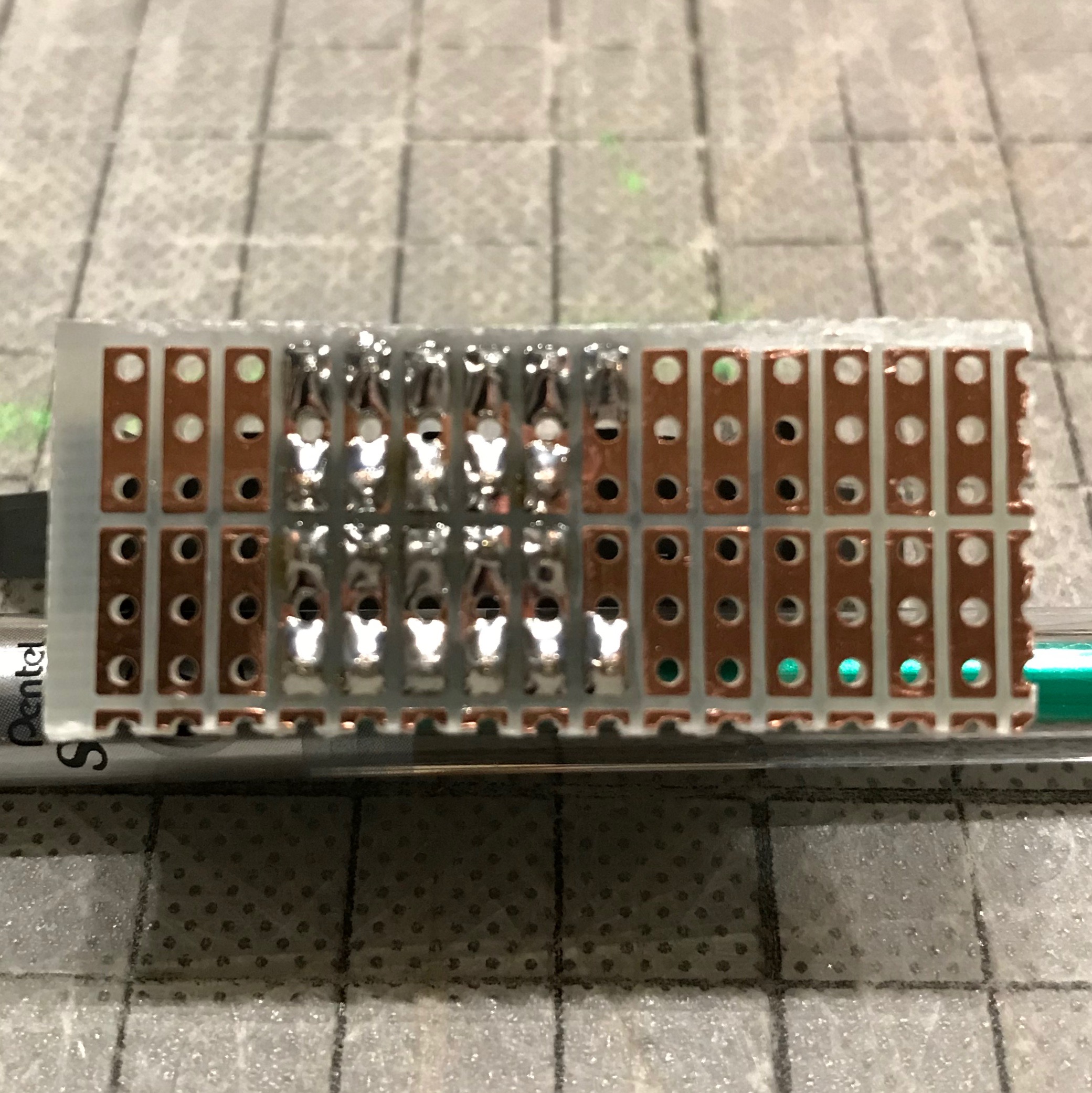
Hier sprechen wir von vier Leitungen pro Motor: GND, 3.3 Volt, „links“ und „rechts“. Diese sollen am besten per Flachbandkabel mit dem Raspberry Pi verbunden werden. Hierzu habe ich mir eine kleine Adapterplatine mit Wannenstecker gelötet:
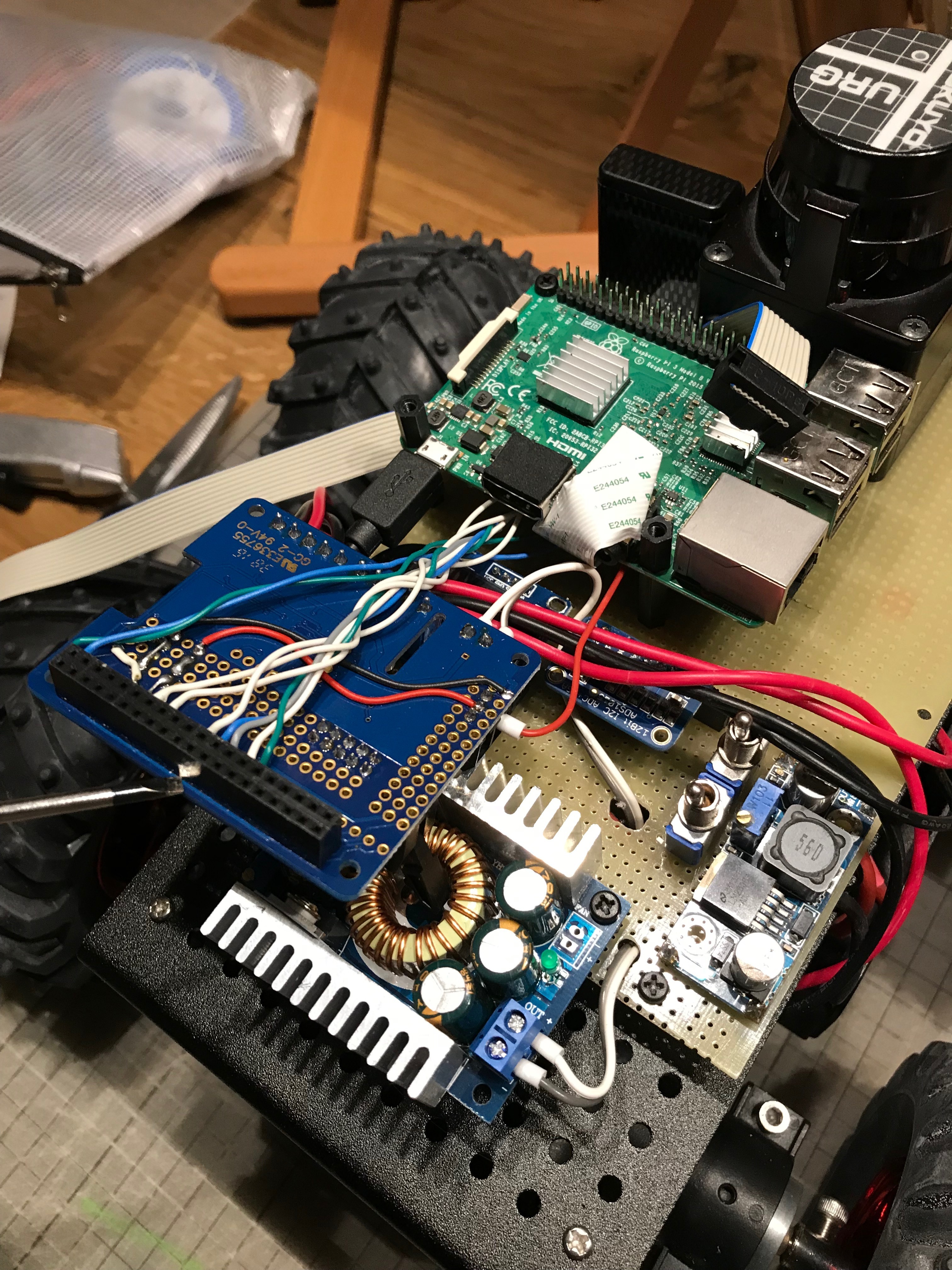
Auf dem Motor HAT für den Raspberry Pi ist praktischerweise noch Platz für eigene Bauteile, hier habe ich nun den Wannenstecker für das Flachbandkabel als Gegenstück eingelötet und mit den GPIOs der Pi verbunden.
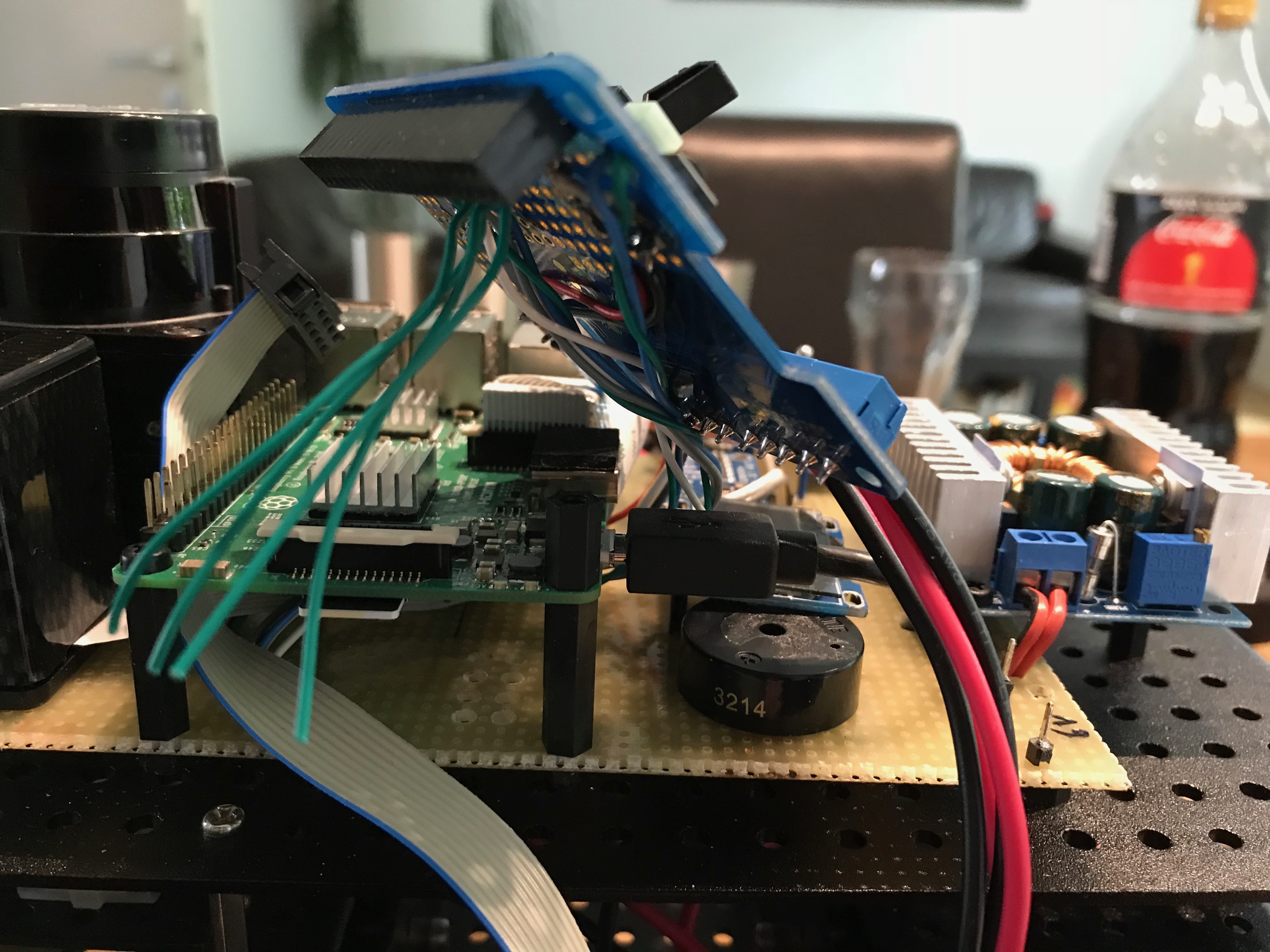
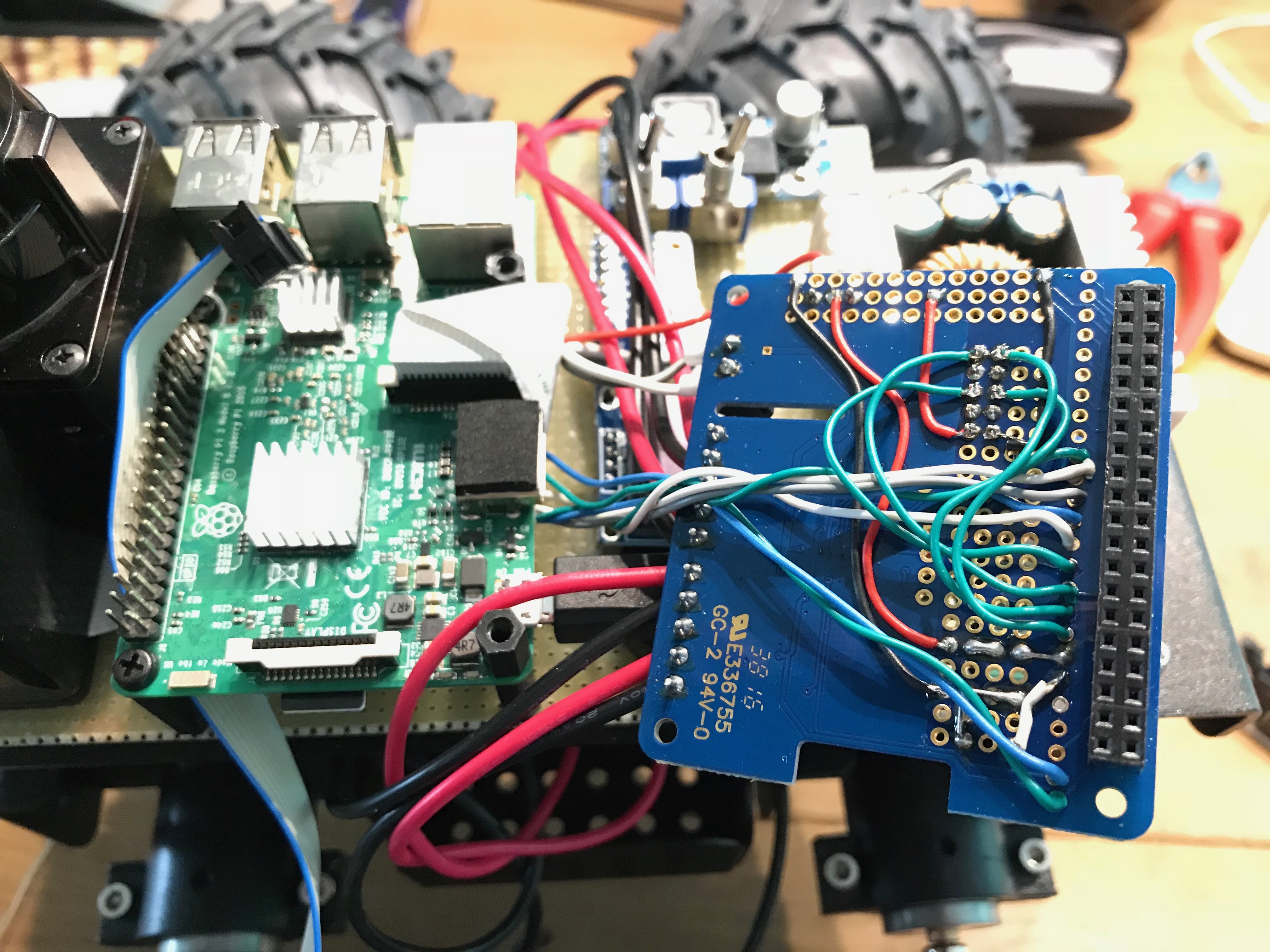
Und da man am Ende immer vergessen hat, wie die Belegung war, hier schnell ein Foto für meine eigene Dokumentation: