Nachdem ich letztes Mal ewig nach einem Fehler bei der Ansteuerung des Monster Moto Shields suchte, lief es am Ende noch immer nicht mit beiden Motoren – und vor allem nicht in beiden Fahrtrichtungen! Aber woran lag es?
Kategorie: Foto
Debugging minibot
Manchmal sieht etwas so einfach aus: Schaltplan skizzieren, alles aufbauen und los geht’s. Das dachte ich auch bei meinem neuen Roboter dem minibot. Aber leider bewegten sich die Motoren meines kleinen Bots kein Stück.
Lange suchte ich den Fehler in der neu erstellten Test-Software, die ich (erstmals) in Python programmierte. Insbesondere, da das Monster Moto Shield zur Geschwindigkeitsregelung der Motoren PWM (Pulsweitenmodulation) benötigt. Diese wird mit dem verwendeten Python-Modul GPIO per Software erzeugt. Zum Mitmachen und Suchen des Fehlers hier einmal der verwendete Sourcecode:
Abschluss der Verkabelung des minibot
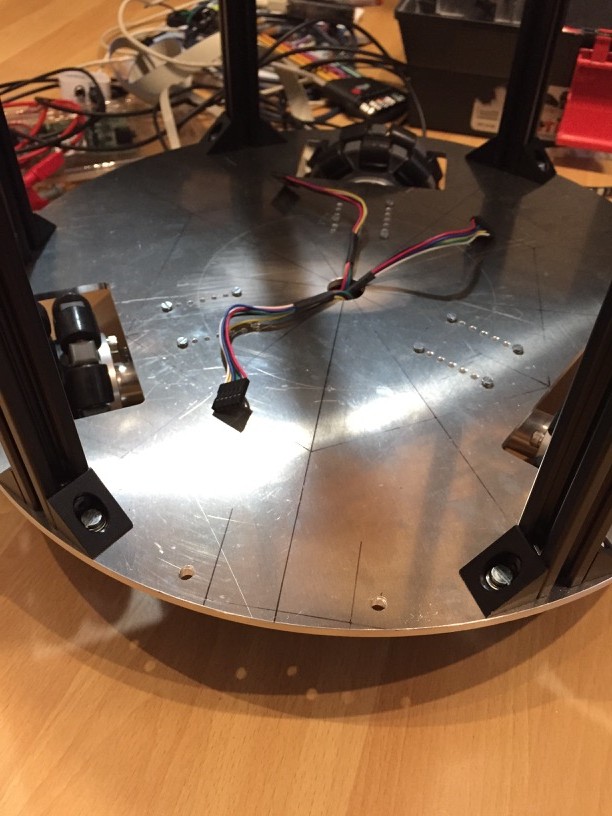
Wie gestern auf Twitter angekündigt, ging es weiter mit der Verkabelung meines neuen minibot. Und das konnte endlich abgeschlossen werden! Der aktuelle Stand soll natürlich wie immer hier dokumentiert werden. Und warum mich ein Nicht-Rastermaß sehr genervt hat, sieht man auch später. Aber der Reihe nach.
Neues Jahr, neuer Bot – minibot
Ja, wie das so mit Nachwuchs ist. Man findet erst mal weniger Zeit, für sich und seine Hobbys. Darunter leidet leider auch diese Seite etwas, weil die Prioritäten (hobbymäßig) auf meinen Podcasts Robotiklabor und Reich & Knapp liegen.
Nun war es mit dem letzten Bot irgendwie nicht so richtig weitergegangen und er war ja nun auch wieder etwas groß geraten. Außerdem wollte ich mich bereits seit langer Zeit an ROS (Robot Operating System) wagen.
Der Focus wandert also aktuell etwas weg vom Hardwaredesign, hin zu einer Arbeit bzw. Umsetzung mit bereits existierenden Software-Bibliotheken/-Komponenten. Und mit ROS muss man das Rad nicht komplett neu erfinden, so wie ich es aus Neugierde und Spaß mit der bisherigen direcs-Software bisher tat. Mit allen Vor- und Nachteilen, die letzteres so mit sich brachte.
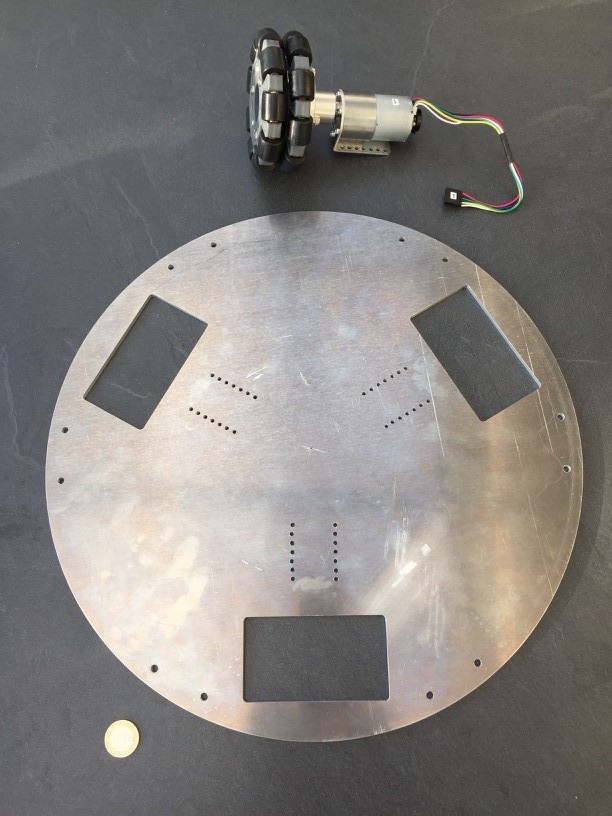
Ich habe mich nun also in 2017 für ein sehr kleine, fertige Fahr-Plattform entschieden, den RP6 von Conrad – allerdings nur für das nackte Fahrgestell.
Oben drauf soll eine einfach Platine zur Verkabelung und Montage der Sensoren und Elektronik montiert werden. Zur Verwendung kommen voraussichtlich folgende Komponenten
- Ein Raspberry Pi („Raspi“) – das Hirn des Roboter.
- Ein Hokuyo URG-04LX-UG01 Laserscanner – der vorerst einzige Sensor des Roboters.
Ein Sparkfun Monster MotoShield – zur Ansteuerung der beiden Motoren.- Update: Ein Adafruit DC & Stepper Motor HAT for Raspberry Pi – Mini Kit – zur Ansteuerung der Motoren per I2C.
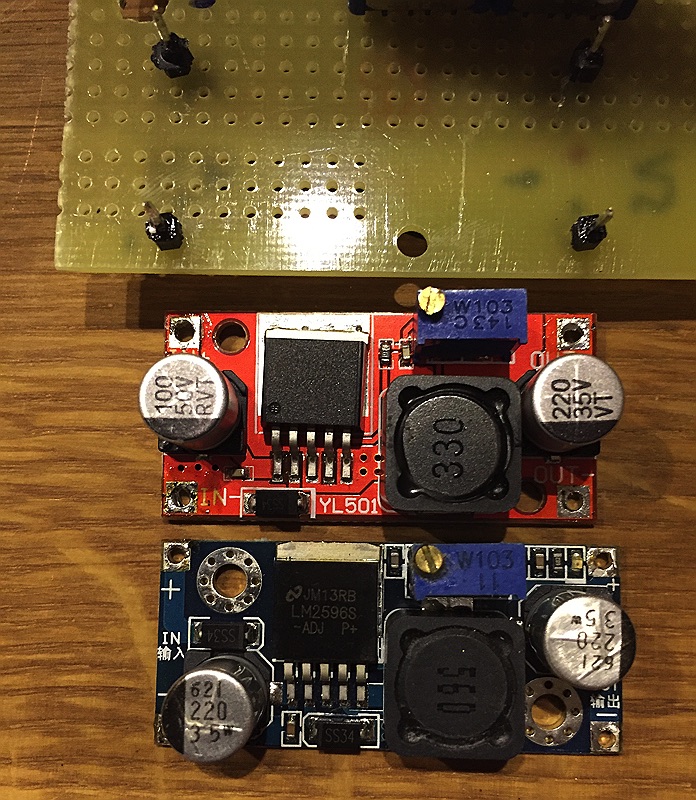
- Ein 0815-Schaltregler – zur Erzeugung der notwendigen 5V-Spannung für den Raspi.
- Ein Akku – die Stromversorgung für den Roboter.
Ach ja, heißen soll der Roboter – wie immer sehr kreativ ;) – „minibot„.
Wie das Ganze bisher aussieht? Hier wie immer die aktuellen Fotos. Ich bin gespannt über euer Feedback!
Überarbeitung der Deckplattenbefestigung
Bisher war die Deckplatte mit jeweils zwei Schrauben und den dreieckigen Haltern an den Aluprofilen befestigt. Hier besteht aber das Risiko, dass es mehr Möglichkeiten gibt, wo sich etwas lockern kann.
Darum wurden nun 5 mm-Gewinde in die senkrechten Profile gebohrt. Das Ganze lässt das ganze trotz weniger Schrauben wesentlicher stabiler erscheinen. Und hier die Bilder im Detail:

Eine Zwischenebene für den omnibot
Damit die Elektronik auf dem Bot gut untergebracht werden kann, wurde eine Zwischenebene aus Kunststoff eingebaut. Diese hat außerdem den Vorteil, dass sie nicht-leitend ist. Dadurch können Platinen so ohne Kurzschlussrisiko problemlos montiert werden.

Montage des Laserscanners
Schweren Herzens werden nun nach und nach die Teile des alten Roboters direcs1 „recycled“ und auf den Omnibot hier verbaut. Als erstes der größte und wichtigste Sensor: der Sick Laserscanner.
Montage der Außenprofile
Da der Roboter rund und „hochkant“ werden soll, erfolgte als nächstes die Montage der seitlichen Albprofile und des abschließenden „Deckels“.

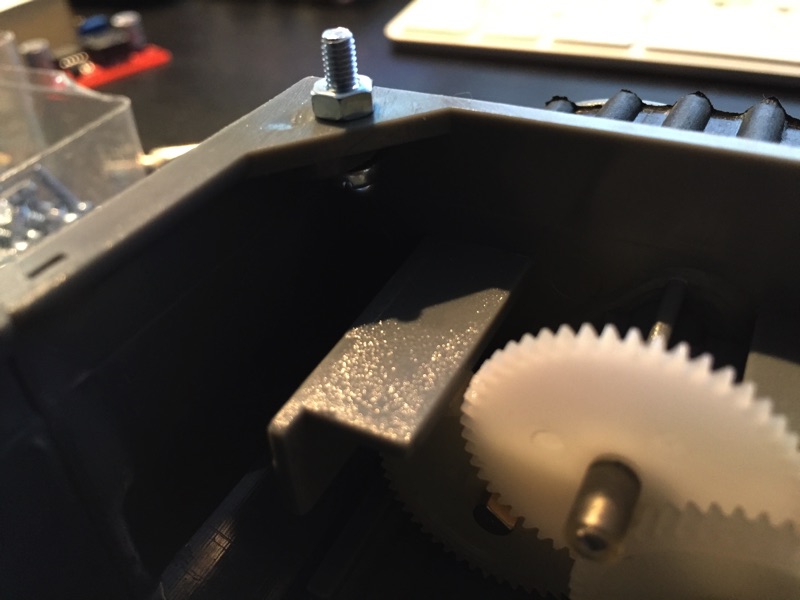
Montage der Motoren
Wird Zeit, dass ich mit der Berichterstattung fortfahre. Darum soll in den nachfolgenden Bildern kurz dargestellt werden, wie die Motoren montiert wurden.
Test der Omniwheel-Plattform mit Arduino, Motor Shield und Apple Remote
Nachdem nun das Motor Shield läuft, die Omniwheel-Plattform zusammengebaut wurde und die Apple Remote zum Laufen gebracht wurde, galt es nun, alles gemeinsam zu testen.
Als erstes wurde ein LiPo-Akku hinzugefügt und mit einem StepDown-Regler von Pololu verbunden. Übergangsweise wurde hier noch ein „kleiner“ 5 Ampere-reger verwendet.
Test der Omniwheel-Plattform mit Arduino, Motor Shield und Apple Remote weiterlesen