Ich finde ja, ein Roboter der etwas auf sich hält, benötigt ein Display. :) Nicht nur, dass es „was hermacht“, es ist auch hervorragend zum Anzeigen wichtiger Informationen oder zum Debuggen hilfreich.
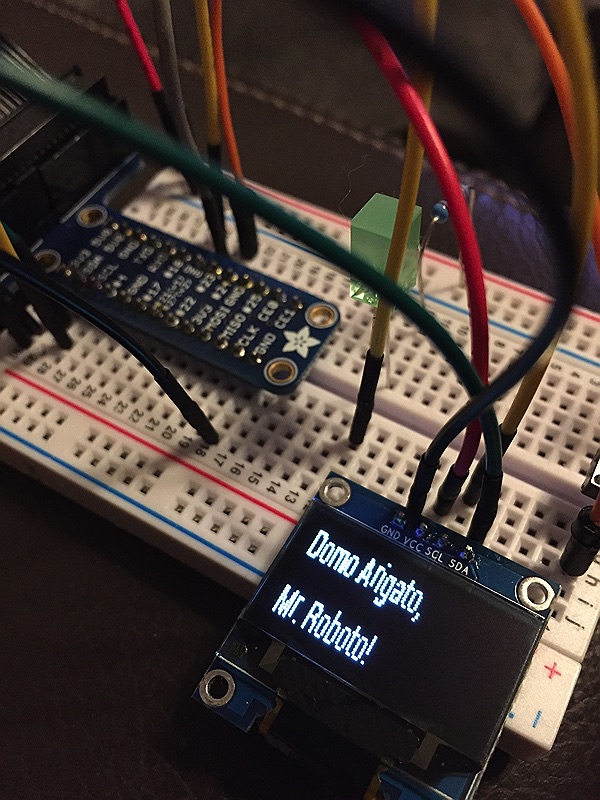
Der Einfachheit halber entschied ich mich beim minibot für ein kleines und günstiges OLED-Display, welches via I2C angesteuert wird. Damit kann es sehr einfach für einen Raspberry Pi, als auch für einen Arduino genutzt werden. Die Auflösung des LCD beträgt 128×64 Pixel und es ist ganze 0,96″ groß – für meine Zwecke aber völlig ausreichend. Aber Vorsicht: Es wird nicht immer die gleiche Version der Platine geliefert. Manchmal sind + und – je nach Lieferung vertauscht (aber stets korrekt beschriftet)!
Es ist übrigens ein grafisches Display. Das bedeutet, man kann nicht nur Text, sondern auch Bilder anzeigen oder selbst Linien, Kreise etc. zeichnen. Für diesen Zweck gibt es zwei fertige Bibliotheken, für die Adafruit mal wieder ganze Arbeit geleistet hat!
Besser wäre es gewesen, ein Original Adafruit-Display zu kaufen, denn diese stellen mal wieder eine super Anleitung zur Ansteuerung zur Verfügung.
Und das Ganze hat dann auch mal auf Anhieb funktioniert – sogar mit eigenem Font: